S-ar putea să vă placă și
- Atestat NicoDocument38 paginiAtestat NicoFlorentina LucanÎncă nu există evaluări
- Licenta Injector 2Document10 paginiLicenta Injector 2Strumf HerMonstaÎncă nu există evaluări
- Curs Dinamica Intreg PDFDocument137 paginiCurs Dinamica Intreg PDFCosmin JilaveanuÎncă nu există evaluări
- Bazele Ingineriei Autovehiculelor Rutiere (PDF - Io)Document94 paginiBazele Ingineriei Autovehiculelor Rutiere (PDF - Io)vladÎncă nu există evaluări
- Repararea Instalatiei de PornireDocument8 paginiRepararea Instalatiei de Pornirexyzmury_290480966Încă nu există evaluări
- ETDA - PPT CursDocument317 paginiETDA - PPT CursCostinel BogheanuÎncă nu există evaluări
- ADocument11 paginiAAdi Șveț100% (1)
- Subiecte Concurs Ghiulai - Editia 1-A 2014Document4 paginiSubiecte Concurs Ghiulai - Editia 1-A 2014Kulpinszki AndreiÎncă nu există evaluări
- Amortizarea Amortizorului Telescopic Hidraulic BitubularDocument13 paginiAmortizarea Amortizorului Telescopic Hidraulic BitubularBogdan RaduÎncă nu există evaluări
- Transmisi Prin Roti DintateDocument1 paginăTransmisi Prin Roti DintateRusu Alex100% (1)
- Examen BIADocument7 paginiExamen BIAGavriloae Ion100% (1)
- Diagn Instal AprindereDocument26 paginiDiagn Instal AprindereSongoku PopescuÎncă nu există evaluări
- Mecanic Auxiliar - MHPDocument65 paginiMecanic Auxiliar - MHPMihaela Dana MarinescuÎncă nu există evaluări
- Proiect de DiplomaDocument124 paginiProiect de DiplomaGrigore VladÎncă nu există evaluări
- Studiul Cutiilor de Viteze Robotizate / Automate: 1. Scopul LucrăriiDocument13 paginiStudiul Cutiilor de Viteze Robotizate / Automate: 1. Scopul LucrăriiTiNuÎncă nu există evaluări
- WWW - Referat.ro-Atestat Clasa 114035356Document19 paginiWWW - Referat.ro-Atestat Clasa 114035356Iulian Mark TrifanÎncă nu există evaluări
- Dreptul Mediului. Circulatia AutoDocument9 paginiDreptul Mediului. Circulatia AutoAnca Paula NastaseÎncă nu există evaluări
- Atestat Vasile Tusa 11BDocument17 paginiAtestat Vasile Tusa 11BVlad AlexÎncă nu există evaluări
- Conv Hidraulic + Reductor PlanetarDocument10 paginiConv Hidraulic + Reductor PlanetarphimalayaÎncă nu există evaluări
- Drăgan A. Mihăiță Echipamentul Electric Al AutovehiculelorDocument19 paginiDrăgan A. Mihăiță Echipamentul Electric Al AutovehiculelorElena MiulescuÎncă nu există evaluări
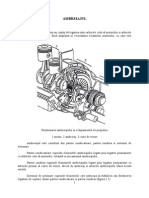
- AMBREIAJULDocument21 paginiAMBREIAJULŞtefania ApostolÎncă nu există evaluări
- Transmisie Prin Curele-Roti Cu FrictiuneDocument29 paginiTransmisie Prin Curele-Roti Cu Frictiunecaty2Încă nu există evaluări
- Standuri de Diagnosticare A Instalației de Răcire UngereDocument16 paginiStanduri de Diagnosticare A Instalației de Răcire UngereChange ParafinÎncă nu există evaluări
- Diagnosticare Sistemul de AprindereDocument23 paginiDiagnosticare Sistemul de AprindereCorneliu Birtok-BaneasaÎncă nu există evaluări
- Punte MultibratDocument8 paginiPunte MultibratNicolae SabinÎncă nu există evaluări
- Puntea Motoare FinalDocument45 paginiPuntea Motoare Finalnicusor1995Încă nu există evaluări
- Cursurii MecatronicaDocument66 paginiCursurii MecatronicaCostinel Bogheanu100% (1)
- SRA Sist de Regl Automata - Amplif de Tensiune de EroareDocument17 paginiSRA Sist de Regl Automata - Amplif de Tensiune de Eroareromeo1966Încă nu există evaluări
- Automobilul Construcţie Funcţionare Depanare PDFDocument389 paginiAutomobilul Construcţie Funcţionare Depanare PDFTiberius-Constantin SpatariuÎncă nu există evaluări
- Proiect de DiplomaDocument21 paginiProiect de DiplomacolibabaÎncă nu există evaluări
- Diagnoza Instalatia de AprindereDocument6 paginiDiagnoza Instalatia de AprindereMetin OmerÎncă nu există evaluări
- Dezvoltarea Electronicii La Bordul AutovehicululuiDocument7 paginiDezvoltarea Electronicii La Bordul AutovehicululuiSimona MoraruÎncă nu există evaluări
- Transmisii Mecanice Roti FrictiuneDocument13 paginiTransmisii Mecanice Roti FrictiuneRazvan VerboncuÎncă nu există evaluări
- Clasificarea Motoarelor Cu Ardere Interna Pentru AutomobileDocument2 paginiClasificarea Motoarelor Cu Ardere Interna Pentru AutomobileAnonymous pn6VnE100% (2)
- ColeDocument40 paginiColeCatalin IanusÎncă nu există evaluări
- Atestat Montarea Grupului PropulsorDocument14 paginiAtestat Montarea Grupului PropulsorManeaRebecca100% (1)
- Transmisii Prin Roți de FricțiuneDocument1 paginăTransmisii Prin Roți de Fricțiunemanu ioana danielaÎncă nu există evaluări
- Cuplaje Utilizate in Cadrul Sistemelor de Transmisie MecanicaDocument18 paginiCuplaje Utilizate in Cadrul Sistemelor de Transmisie MecanicaMarius BoitaÎncă nu există evaluări
- Curs 6 NDocument23 paginiCurs 6 NDan AlexandruÎncă nu există evaluări
- Amplificatoare de CupluDocument6 paginiAmplificatoare de Cuplumarius_stinguÎncă nu există evaluări
- CL - Xii Tehnician TransporturiDocument56 paginiCL - Xii Tehnician TransporturiDiana FilipÎncă nu există evaluări
- Instalația de RăcireDocument23 paginiInstalația de Răciremahuclaudia9Încă nu există evaluări
- Verif Jocurilor Mec DistributieDocument21 paginiVerif Jocurilor Mec DistributieCatalina Vasile100% (1)
- Universitatea Din PitestiDocument22 paginiUniversitatea Din PitestiTudor IonuțÎncă nu există evaluări
- Sistemul de Ungere Cu Ulei A MotoruluiDocument19 paginiSistemul de Ungere Cu Ulei A MotoruluiCatalina IoanaÎncă nu există evaluări
- Cap 4Document23 paginiCap 4Viorel StegaruÎncă nu există evaluări
- Tipruri de Ambreiaje Utilizate La Autovehicule BerechetDocument30 paginiTipruri de Ambreiaje Utilizate La Autovehicule BerechetElena MiulescuÎncă nu există evaluări
- Curs Dinamica Prof. C.AndreescuDocument19 paginiCurs Dinamica Prof. C.AndreescumuheecanewÎncă nu există evaluări
- BrevetDocument12 paginiBrevetLeonid ChimingerÎncă nu există evaluări
- I. Soluții de Cuplare A Treptelor de Viteză. Sistemul de Acționare Al Schimbătoarelor de VitezăDocument27 paginiI. Soluții de Cuplare A Treptelor de Viteză. Sistemul de Acționare Al Schimbătoarelor de VitezăMihai CucicuÎncă nu există evaluări
- Calculul Si Constructia Puntii MotoareDocument19 paginiCalculul Si Constructia Puntii MotoarenifedanÎncă nu există evaluări
- Fisa de StudiuDocument4 paginiFisa de StudiuRazvan AsciuÎncă nu există evaluări
- Transmisi Cu Roti de Fictiune (Lectie de ProDocument9 paginiTransmisi Cu Roti de Fictiune (Lectie de ProElena LascuÎncă nu există evaluări
- Curs Autovehicule Si Instalatii Speciale Cap.1.1Document10 paginiCurs Autovehicule Si Instalatii Speciale Cap.1.1Roman IoanÎncă nu există evaluări
- Subiecte La Examenul Constructia AutomobiluluiDocument5 paginiSubiecte La Examenul Constructia Automobiluluicvv1ctcÎncă nu există evaluări
- 1 AngrenajeDocument85 pagini1 AngrenajeMihaela MoianuÎncă nu există evaluări
- Control Pendul InversDocument11 paginiControl Pendul InversBoanda Constantin GeorgeÎncă nu există evaluări
- Curs 4-Mecanismul Sist de Directie, Unghiurile de FugaDocument39 paginiCurs 4-Mecanismul Sist de Directie, Unghiurile de FugaBalan C. SilviuÎncă nu există evaluări
- Curs 09 - Mecanisme Cama Si TachetDocument20 paginiCurs 09 - Mecanisme Cama Si TachetBogdan RaduÎncă nu există evaluări
- Angrenaje An IIDocument42 paginiAngrenaje An IIraducutanase86Încă nu există evaluări
- Proiect Organe de MasiniDocument79 paginiProiect Organe de MasiniRazvan George Ilie75% (4)
- Dinamica 001 SkodaDocument26 paginiDinamica 001 SkodaBogdan RaduÎncă nu există evaluări
- Audi CSPDocument23 paginiAudi CSPBogdan RaduÎncă nu există evaluări
- IncovoiereDocument30 paginiIncovoiereBogdan RaduÎncă nu există evaluări
- C6 MF 2019 - 2020 Ar IfrDocument11 paginiC6 MF 2019 - 2020 Ar IfrBogdan RaduÎncă nu există evaluări
- Curs 08 - Mecanisme Spatiale ArticulateDocument15 paginiCurs 08 - Mecanisme Spatiale ArticulateBogdan RaduÎncă nu există evaluări
- C5 MF 2019 - 2020 Ar IfrDocument12 paginiC5 MF 2019 - 2020 Ar IfrBogdan RaduÎncă nu există evaluări
- Curs 06 - Mecanisme - Analiza Cinematica A Mecanismelor Patrulatere PlaneDocument30 paginiCurs 06 - Mecanisme - Analiza Cinematica A Mecanismelor Patrulatere PlaneBogdan RaduÎncă nu există evaluări
- Curs 09 - Mecanisme Cama Si TachetDocument20 paginiCurs 09 - Mecanisme Cama Si TachetBogdan RaduÎncă nu există evaluări
- Curs 07 - Mecanisme Biela ManivelaDocument16 paginiCurs 07 - Mecanisme Biela ManivelaBogdan RaduÎncă nu există evaluări
- Curs 05 - Mecanisme - Mecanism Patrulater - Transformare - GrupeDocument12 paginiCurs 05 - Mecanisme - Mecanism Patrulater - Transformare - GrupeBogdan RaduÎncă nu există evaluări
- C7 MF 2019 - 2020 Ar IfrDocument7 paginiC7 MF 2019 - 2020 Ar IfrBogdan RaduÎncă nu există evaluări
- 14 TERM Capitolul 13Document22 pagini14 TERM Capitolul 13Bogdan RaduÎncă nu există evaluări
- Curs 13 - Mecanisme - Dinamica - Reducere MaseDocument16 paginiCurs 13 - Mecanisme - Dinamica - Reducere MaseBogdan RaduÎncă nu există evaluări
- Curs 14 - Mecanisme - Sinteza MecanismelorDocument16 paginiCurs 14 - Mecanisme - Sinteza MecanismelorBogdan RaduÎncă nu există evaluări
- Curs 02 - Mecanisme Obiect Si Metode de StudiuDocument13 paginiCurs 02 - Mecanisme Obiect Si Metode de StudiuBogdan RaduÎncă nu există evaluări
- Curs 04 - Mecanisme LANT CINEMATIC - MECANISM - Grad MobilitateDocument8 paginiCurs 04 - Mecanisme LANT CINEMATIC - MECANISM - Grad MobilitateBogdan RaduÎncă nu există evaluări
- Curs 03 Mecanisme Analiza Structurala Element CuplaDocument13 paginiCurs 03 Mecanisme Analiza Structurala Element CuplaBogdan RaduÎncă nu există evaluări
- Curs 03 Mecanisme Analiza Structurala Element CuplaDocument13 paginiCurs 03 Mecanisme Analiza Structurala Element CuplaBogdan RaduÎncă nu există evaluări
- Curs 01 - Mecanisme - Cinematica RigiduluiDocument20 paginiCurs 01 - Mecanisme - Cinematica RigiduluiBogdan RaduÎncă nu există evaluări
- Echilibrarea RotorilorDocument10 paginiEchilibrarea RotorilorBogdan RaduÎncă nu există evaluări
- Metodologie Ex Online - Var Final CFDocument10 paginiMetodologie Ex Online - Var Final CFBogdan RaduÎncă nu există evaluări
- Cap 3Document36 paginiCap 3Bogdan RaduÎncă nu există evaluări
- Cum Ne Alegem Lubrifiantii La MotorDocument4 paginiCum Ne Alegem Lubrifiantii La MotorLuigi MoruzÎncă nu există evaluări
- BIBLIOG VibratiiDocument1 paginăBIBLIOG VibratiiBogdan RaduÎncă nu există evaluări
- Cap 2Document3 paginiCap 2Bogdan RaduÎncă nu există evaluări
- Arcuri Bara de TorsiuneDocument6 paginiArcuri Bara de TorsiuneCrisan PaulÎncă nu există evaluări
- Cap 5Document10 paginiCap 5Bogdan RaduÎncă nu există evaluări
- Cap 4Document5 paginiCap 4Bogdan RaduÎncă nu există evaluări