Documente Academic
Documente Profesional
Documente Cultură
Dinamica Autovehiculelor - Proiect
Încărcat de
Ionela GiuroiuTitlu original
Drepturi de autor
Formate disponibile
Partajați acest document
Partajați sau inserați document
Vi se pare util acest document?
Este necorespunzător acest conținut?
Raportați acest documentDrepturi de autor:
Formate disponibile
Dinamica Autovehiculelor - Proiect
Încărcat de
Ionela GiuroiuDrepturi de autor:
Formate disponibile
Proiect
- Dinamica Autovehiculelor
1Organizarea general i alegerea parametrilor principali
1.1Studiul soluiilor similare
Pentru abordarea proiectrii unui nou tip de autovehicul, innd seama de
datele impuse, prin tem, care precizeaz anumite particulariti legate de destinaia
i performanele acestuia, este nevoie, ntr-o prim etap, s se caute un numr ct
mai mare de soluii constructive, deja existente, avnd caracteristici asemntoare cu
cele ale autovehiculului cerut. Literatura de specialitate cuprinde pentru fiecare
categorie de autovehicule informaii legate de organizarea general, de modul de
dispunere al motorului i puni motoare, de organizare a transmisiei; de asemenea
sunt date principalele dimensiuni geometrice, greutatea util i proprie, tipul
sistemelor de direcie i frnare, tipul suspensiei.
Analiznd cu atenie toate aceste informaii i avnd n vedere tendinele de
dezvoltare caracteristice pentru fiecare categorie de autovehicule cercetat se pot
stabili, pentru nceput, prin comparare, unele date iniiale, absolut necesare pentru
calculul de predimensionare, cum ar fi: organizarea general, dimensiunile
geometrice, greutatea autovehiculului i repartizarea sa pe puni, alegerea roilor i
determinarea razei de rulare.
La soluia 44 cu traciune integral , dispunerea motorului se face n partea
din fa , iar antrenarea puni se face prin componentele transmisiei distribuite de-a
lungul axei longitudinale a automobilului . Soluia iniial dezvoltat pentru
automobile cu capacitate mrit de trecere , prezint avantajul repartizrii fluxului de
putere la toate roile automobilului , ameliorindu-se calitile de traciune , mai ales
n teren greu , unde se reduce riscul patinrii roilor . n plus la frnarea cu motorul ,
forele de frnare se repartizeaz pe toate cele 4 roi , ceea ce ofer avantaje n
special la frnare pe ci alunecoase .
1.2 Alegerea principalelor dimensiuni geometrice i de mas
Autovehiculul este un vehicul rutier autopropulsat care se poate deplasa pe un drum
sau pe un traseu neamenajat, fiind echipat cu roi, cu enile , cu patine sau cu pern de aer.
Autovehiculul pe roi este autovehiculul suspendat elastic pe cel puin trei roi i servete
pentru transportul persoanelor i a bunurilor, pentru tractarea unor autovehicule fr
mijloace proprii de propulsie i pentru efectuarea de servicii speciale. Automobilul este un
autovehicul pe roi carosate.
Opel
Frontera
Limited
Toyota
L-450
Nissan
Terrano
II
Citroen
Visa
Mitsubishi
Pajero
3.2DI-D
Subaru
Forester
Caroserie 4 4 4 4 4 4 4 4 4 4 4 4
Nr ui 5 5 2 5 3 5
Nr. locuri 5 5 5 5 5 5
Cilindree 3465cmc 2874cmc 2690cmc 2400cmc 3497cmc 1994cmc
Alezaj curs 8089 7983 7779,5 7577 8989 9090
Lungime 4658 mm 5642 mm 4700 mm 4300mm 4780 mm 4460 mm
Lime 1787 mm 1850 mm 1820 mm 1720mm 1780 mm 1735mm
nlime 1740 mm 1740 mm 1700 mm 1720mm 1910 mm 1595 mm
Ampatament 2855 mm 2630 mm 2750 mm 2430mm 2722 mm 2425 mm
Ecatament 1634/
1645 mm
1500/
1540 mm
1530/
1540 mm
1340/
1350mm
1430/
1445 mm
1530/
1580 mm
Putere max.. 205CP/
5400 rpm
129CP/
4000 rpm
128CP/
4800 rpm
120/
6800rpm
194/
5000 rpm
125CP/
5600 rpm
Cuplu max . 290Nm/
3000 rpm
427Nm/
4000 rpm
220Nm/
3200 rpm
131Nm/
4500
rpm
313Nm/
3000 rpm
184Nm/
3600 rpm
Masa proprie 1740kg 2065kg 2100kg 2205kg 2500kg 1365kg
Pneuri 245/
70R16
265/
70R16S
265/
70R18S
190/
55HR34
265/
65R18H
205/70
R15H
Viteza max. 187Km/h 175Km/h 180Km/h 180Km/
h
180Km/h 180Km/h
Autovehiculele destinate pentru transportul de persoane se numesc autoturisme, cnd
au o capacitate de maxim opt locuri, autobuze cnd au capacitate mai mare de opt locuri i
automobile de performan cnd se urmrete realizarea unor performane.
Amenajarea general a autovehiculului de proiectat se adopt n urma studiului
soluiilor similare de organizare general a altor autoturisme i al datelor impuse prin tema
de proiectare .
1. Dimensiuni geometrice
Avnd n vedere aceste concluzii , cunoscnd datele impuse prin tema de
proiect i urmrind tendinele actuale din construcia de automobile am adoptat
principalele dimensiuni geometrice i de mas pentru un autoturism tot-teren, 5
locuri i vitez maxim 180km/h.
Lungimea total 4200 mm ;
Limea total 1720 mm ;
nlime total 1830 mm ;
Ampatament 2450 mm ;
Consol fa mm ;
Consol spate mm ;
Ecartament fa 1450 mm ;
Ecartament spate 1430 mm ;
Dimensiune anvelope 235/70 R 15 R;
Lungimea automobilului ( La), reprezint distana dintre dou plane perpendiculare
pe planul longitudinal de simetrie al automobilului i tangenta la acesta n punctele
extreme din fa i din spate. Toate elementele din fa sau din spate ale
automobilului sunt incluse n aceste dou plane.
Limea automobilului ( l ), reprezint distana dintre dou plane paralele cu planul
longitudinal de simetrie al vehiculului tangente la acestea de o parte i de alta. Toate
organele laterale ale vehiculului fixate rigid, cu excepia oglinzilor retrovizoare sunt
cuprinse ntre aceste plane.
nlimea vehiculului ( h ), reprezint distana dintre planul de sprijin i un pla
orizontal tangent la partea cea mai de sus a vehiculului pregtit de plecare n curs
fr ncrctur util, cu pneurile unflate la presiune corespunztoare masei totale
maxime admise.
Ampatamentul ( L ), reprezint distana dintre perpendicularele coborte pe planul
longitudinal de simetrie al vehiculului corespunztoare la dou roi consecutive
situate de aceiai parte a vehiculului.
Ecartamentul ( E ), reprezint distana dintre centrele punctelor de contact ale
pneurilor cu solul.
Consola fa spate ( C1, C2 ), reprezint distana de la punctul extrem din fa
respectiv spate al vehiculului, pn la planul vertical care trece prin centrul roii din
fa respectiv spate.
Garda la sol ( hf ), reprezint nlimea maxim a unui dreptunghi al crui plan este
perpendicular pe planul longitudinal de simetrie al vehiculului, care mparte acest
dreptunghi n dou pri egale. Dreptunghiul trebui s se poat deplasa sub vehicul
fr s ating vreun punct al acestuia.
5
Greutatea automobilului
Greutatea autovehiculului este un parametru important la proiectare i
reprezint suma greutii tuturor mecanismelor i agregatelor din construcia acestuia
precum i greutatea ncrcturii.
n cazul automobilelor metoda recomandat pentru alegerea greutii proprii
const n adoptarea ei pe baza maselor proprii ale tipurilor similare, avndu-se n
vedere tendinele de dezvoltare care vizeaz utilizarea unor soluii constructive i
materiale cu mase proprii reduse,astfel c se creeaz premisa reducerii maselor
proprii.
Astfel n urma studiului soluiilor similare masa proprie a automobilului de
proiectat se adopt: kg m
O
1740 =
Masa automobilului ( m
a
) face parte din parametri generali i reprezint suma
dintre masa util ( m
u
) i masa proprie ( m
p
).
Prin tema de proectat masa util a autovehiculului m
u
estede1500 kg
. 3240 1740 1500 kg m m m
o u a
= + = + =
Fa de masele determinate mai sus , se determin greutatea automobilului G
a
,
greutatea util G
u
i greutatea proprie G
o
cu relaiile :
G
a
= m
a
*10 =1740*10=17400
G
u
= m
u
*10 =1500*10=1500
G
p
= m
p
*10 =3240*10=32400
Masa autovehiculului este considerat n centrul de greutate situat n planul vertical,
ce trece prin axa longitudinal de simetrie a autovehiculului. Poziia centrului de mas se
apreciaz prin coordonatele longitudinale a i b i nlimea h
g
conform STAS 6926/2-78.
Alegerea poziiei centrului de mas se poate face prin mai multe metode precum :
a) Utilizarea de valori n concordan cu valorile coordonatelor centrului de
mas al autovehiculelor considerate n studiul soluiilor similare .
b) Utilizarea de valori medii dup date oferite de literatura de specialitate.
c) Determinarea analitic a coordonatelor centrului de mas.
Utiliznd valori medii din literatura de specialitate se adopt parametrul
L
a
=0.45
pentru autovehiculul gol, unde L este ampatamentul autovehiculului.
Din relaia anterioar va rezulta distana :
a = L 1102 45 , 0 2450 67 . 0 = = mm
tiind c L a = b, rezult c, b = 2450 1102 = 1348 mm.
Cu ajutorul coordonatelor longitudinale a, b, gsite se va determina greutatea pe
puntea fa cu urmtoarea relaie:
G
2
=
L
a G
a
[daN]; G
2=
2450
1102 3240
=1457,3 daN
G
1
=
L
b G
a
[daN]; G
1=
2450
1348 3240
=1782,7 daN
nlimea hg se determin prin aceiai metod tiind c raportul:
L
hg
=0,35 de unde
va rezulta, nlimea hg=0,35 2450 =857.5 mm
6
1.3 Alegerea roilor
Roile de automobil snt alctuite dintr-o jant metalic, pe care se monteaz o
anvelop de cauciuc n interiorul cruia se afl o camer cu aer comprimat, uneori lipsind
aceasta. Rigiditatea anvelopei este dat de raportul dintre creterea forei care acioneaz
asupra pneului i deformaia determinat de aceast cretere. Rigiditatea depinde de
materialul anvelopei, de construcia ei, de presiunea interioar a aerului din pneu i de
duritatea suprafeei de sprijin.
Alegerea tipului de pneuri este condiionat de mai muli factori cum ar fi, viteza
maxim transmis prin tema de proiect, i greutarea ce revine roilor din spate i fa.
Funcie de greutatea repartizat punilor se poate determina masa ce revineunui pneu
folosind relaiile:
-pentru pneurile punii fa:
Gp
1
=
2
1
G
; Gp
1
=
2
7 , 1782
= 891,35 daN
-pentru pneurile punii spate:
Gp
2
=
n
G
2
; Gp
2
=
4
1457
= 364,25daN
unde n=2 sau 4, reprezint numrul de pneuri ale punii;
Pentru asigurarea unei bune confortabiliti puntea fa trebuie s fie caracterizat
de o elasticitate mai mare dect puntea spate. La obinerea elasticitii punii fa contribuie
i utilizarea presiunii interioare a aerului din pneu mai mic n fa dect n spate.
Prin reducerea presiunii pneurilor pe puntea din fa, se reduce rigiditatea lateral a
pneului, astfel c prin sporirea deviaiilor laterale se favorizeaz imprimarea unui caracter
constructiv de subvirare, caracterizat de tendina de autostabilizare pe traiectoria rectilinie.
Se adopt din literatura de specialitate, innd cont i de soluiile similare pneurile
235/70 R15 R cu urmtoarele dimensiuni principale:
-janta de msur 6
- limea seciunii maxime 210mm
- diametru exterior 820mm
- raza statica 380 mm
- raza dinamica 384 mm
- mrimea camerei de aer L16
Pentru calculele de dinamica autovehiculului este necesar cunoaterea razei de
rulare, care se apreciaz analitic funcie de raza nominal a roii i un coeficient de
deformare. Coeficientul de deformare depinde de presiunea din pneu i are valorile:
- =0,930-0,935, pentru pneuri utilizate la presiuni mai mici de 600
Kpa
- =0,945-0,950, pentru pneuri utilizare la presiuni mai mari de 600
Kpa
n cazul n care se precizeaz mrimea circumferinei de rulare, raza de
rulare se calculeaz cu relaia:
r
r
=
t 2
r
L
;
Se adopt coeficientul de deformare =0,945, unde r
r
=0,930 384 =362,4mm
7
Valori recomandate pentru coeficientul
rezistenei la rulare f.
2. Definirea condiiilor de autopropulsare
Micarea autovehiculului este determinat de mrimea, direcia i sensul
forelor active i a forelor de rezisten ce acioneaz asupra acestuia.
Definirea condiiilor de autopropulsare precede calculul de traciune, mpreun
cu care condiioneaz performanele autovehiculului. Cuprinde precizarea, n funcie
de tipul, caracteristicile i destinaia autovehiculului, a cauzelor fizice pentru forele
de rezisten ce acioneaz asupra autovehiculului.
2.1Rezistena la rulare
Rezistenaa la rulare ( R
r
) este ofor cu aciune permanent la rularea roilor
pe cale, de sens opus sensului deplasrii autovehiculului.
Cauzele fizice ale acestei rezistene la naintare sunt: deformarea cu histerezis a
pneului, frecri superficiale ntre pneu i cale, frecrile din lagrele roii, deformarea
cii, percuia dintre elementele pneului i microneregularitile cii, efectul de
ventuz produs de profilele cu contur nchis pe banda de rulare etc.
Fa de cauzele determinate, rezistena la rulare depinde de un numr mare de
factori de influen, printre caresemnificativi sunt: construcia pneului, viteza de
deplasare, presiunea aerului din pneu, forele i momentele ce acioneaz asupra
roii.
n calculele de proiectare dinamic a autovehiculelor, rezistena la rulare este
luat n considerare prin coeficientul rezistenei la rulare f, care reprezint o for
specific la rulare definit prin relaia:
o cos
=
a
r
G
R
f
unde:
R
r
este rezistena la rulare ;
G
a
cos o - componenta
greutii normal pe cale ;
Funcie de tipul, caracteristicile
i destinaia autovehiculului se recomand
alegerea valorilor din domeniile marcate n
diagrama urmtoare:
Folosind relaia:
R
r
= f * G
a
* cos o [ N ]
i adoptnd coeficientul rezistenei la
rulare f din diagram, f = 0,017 , pentru o
cale de rulare nclinat ( cos 17 = 0,96 ),
asfaltat, n stare bun (autoturism ,44 ,
ce ruleaz cu viteza maxim v
max
=
124km/h), rezult:
R
r
= 0,017 * 32400 * 0,96 = 528,7 N
8
2.2Rezistena aerului
Rezistena aerului ( R
a
) reprezint interaciunea, dup direcia deplasrii, dintre
aerul n repaus i autovehiculul n micare rectilinie. Ea este o for cu aciune
permanent de sens opus sensului de deplasare a automobilului.
Cauzele fizice ale rezistenei aerului sunt: repartiia inegal a presiunilor pe
partea din fa i din spate a caroseriei, frecarea dintre aer i suprafeele pe lng care
are loc curgerea acestuia, energia consumat pentru turbionarea aerului i rezistena
curenilor exteriori folosii pentru rcirea diferitelor organe i pentru ventilarea
caroseriei.
Pentru calculul rezistenei aerului se recomand utilizarea relaiei :
R
a
= 1/2 * * C
x
* A * v
2
[ N ]
Unde : - densitatea aerului ; pentru condiii atmosferice standard ( p = 101,33
* 10
-3
[ N/m
2
] i T = 288
o
K ) densitatea aerului este = 1,226 [ kg/m
3
] ;
Cx coeficientul de rezisten a aerului ;
A aria seciunii transversale maxime [ m
2
] ;
V viteza de deplasare a automobilului [ m/s ] ;
Notnd produsul constant : 1/2 * * C
x
= K [ kg/m
3
] numit coeficient
aerodinamic, rezistena aerului este dat de relaia:
R
a
= K * A * v
2
[ N ] unde : K = 0,6125 * C
x
kg/m
3
( condiii atosferice
standard ) ;
Aria transversal maxim se determin cu suficient precizie cu relaia :
A = B * H [ m2 ] unde: B ecartamentul autoturismului [ m ]
H nlimea autoturismului [ m ]
A = 1,720 * 1,830 = 3,147 m
2
Pentru determinarea mrimii coeficientului de rezisten a aerului C
x
, vom
folosi metoda comparativ, conform literaturii de specialitate, analiznd valoarea
acestuia la soluiile similare propuse, i vom adopta o valoare medie. Cx = 0,5
Astfel rezult: R
a
=1/2*1.225*0.5*3,1476*
2
6 . 3
125
|
.
|
\
|
=964N
2.3Rezistena la pant
La deplasarea autovehiculului pe ci cu nclinare longitudinal, greutatea d o
component ( R
p
) dup direcia deplasrii, dat de relaia : R
p
= G
a
* sin o [ N ].
Aceast for este o for rezistent la urcarea rampelor ( de sens opus vitezei
de deplasare ) i o for activ la coborrea pantelor.
Pentru pante cu nclinri mari (o | 35
o
) expresia rezistenei la pant este dat
de relaia :
R
p
= G
a
* p [ N ]
Alegerea unghiului de nclinare longitudinal a cii se face funcie de tipul i
destinaia automobilului.
Pentru cazul nostru adoptm o
max
= 35
o
; rezult R
p
= 32400 * 0.5733 =
18574,9N
9
2.4 Rezistena la demarare
Regimurile tranzitorii ale micrii automobilului sunt caracterizate de sporiri
ale vitezei (demaraje) i reduceri ale vitezei (frnare). Rezistena la demarare ( R
d
)
este o for de rezisten ce se manifest n regimul de micare accelerat a
autovehiculului.
Ca urmare a legturilor cinematice determinate n lanul cinematic al
transmisiei dintre motor i roile motoare, sporirea vitezei de translaie a
autovehiculului se obine prin sporirea vitezelor unghiulare de rotaie ale elementelor
transmisiei i roilor. Masa autovehiculului n micare de translaie capt o
acceleraie liniar, iar piesele aflate n micare de rotaie, acceleraii unghiulare.
Influena asupra ineriei n translaie a pieselor aflate n rotaie se face printr-un
coeficient o , numit coeficientul de influen a maselor aflate n micare de rotaie.
Rezistena la demarare este astfel dat de relaia :
unde : ma masa automobilului [ kg ] ;
o - coeficientul de influen al maselor aflate n micare de rotaie ;
dv/dt = a acceleraia micrii de translaie a autovehiculului [ m/s
2
].
Pentru calculul rezistenei la demarare este necesar cunoaterea mrimii
coeficientului de influen a maselor aflate n micare de rotaie.
Comform literaturii de specialitate , pentru un autoturism 44, cu viteza
maxim de 125 km/h, adoptm momentul masic de inerie al pieselor motorului I
m
=
0,2 kg*m
2
i momentul masic al unei roi I
R
= 2 kg*m
2
.
Din calcule rezult coeficienii maselor astfel : o
m
= 0,0263 i o
R
= 0,0277 .
Pentru acceleraia maxim n prima treapt a C.V. valoarea este a
1
max
= 2,5
m/s
2
.
Deoarece rezistena la rulare ct i rezistena la pant sunt determinate de starea
i caracteristicile cii de rulare, se folosete gruparea celor dou fore ntr-o for de
rezisten total a cii ( R ), dat de relaia : R = Rr + Rp = Ga ( f cos o + sin o )
= Ga * [ N ] unde : - coef. rezistenei totale a cii pentru nclinarea drumului de
35
0
Pentru valorile adoptate anterior = 0,57 .
2.5 Ecuaia general de micare a automobilului
Pentru stabilirea ecuaiei generale a micrii, se consider autovehiculul n
deplasare rectilinie, pe o cale cu nclinare longitudinal de unghi o, n regim
tranzitoriu de vitez cu acceleraie pozitiv. Lund n considerare aciunea simultan
a forelor de rezisten i a forei motoare ( de propulsie ) din echilibru dinamic dup
direcia micrii, se obine ecuaia diferenial :
dt
dv
m R
a d
* *o =
|
.
|
\
|
=
2
* * *
2
1
cos sin * * v A C G f G I
m dt
dv
x a a R
a
o o
o
10
Funcie de condiiile de autopropulsare a autovehiculului, n ecuaia de micare
se definesc mai multe forme particulare :
a) pornirea din loc cu acceleraia maxim ;
n acest caz ecuaia general de micare capt forma particular
unde : a
1
max
acceleraia n prima treapt a C.V.
F
R(a1 max)
= 22150 * 0,017 + 2215 * 1,225 * 2,5= 376,4 + 4695,6 = 4934 N
b) deplasarea pe calea cu panta maxim ;
Corespunztor condiiilor formulate anterior, coeficientul rezistenei specifice a
cii capt forma
F
R
max
= G
a
*
max
= 22150 * 0,57 = 12625.5 N
c) deplasarea cu viteza maxim ;
Din condiia realizrii vitezei maxime pe o cale orizontal n stare bun se
obine forma
F
Rv
max
= 22150 * 0,017+1/2 *1,225 * 2,66* 0,5 * (180/3,6)
2
= 377 + 644.5 =
1021,5 N
max 1 * *
1 max) 1 (
dt
dv
m f G F
a a a R
o + =
2
max max
* * *
2
1
* v A C f G F
x a Rv
+ =
Dinamica autovehiculului
11
Valori recomandate pentru
randamentul transmisiei
3 Calculul de traciune
Calculul de traciune se face n scopul determinrii parametrilor principali ai
motorului i transmisiei, astfel ca autovehiculul de proiectat cu caracteristicile definite
anterior i n condiiile precizate n capitolul precedent s fie capabil s realizeze
performanele prescrise n tema de proiectare sau a performanelor celor mai bune
modele existente sau de perspectiv.
Randamentul transmisiei
Pentru propulsarea autovehiculului puterea dezvoltat de motor trebuie s fie
transmis roilor motoare ale acestuia.
Transmisia fluxului de putere este
caracterizat de pierderi datorate fenomenelor de
frecare dintre organele transmisiei. Calitativ,
pierderile de putere din transmisie se apreciaz prin
randamentul transmisiei q
t
.
Experimentrile efectuate au permis s se
determine urmtoarele valori ale randamentelor
subansamblelor componente ale transmisiei :
- cutia de viteze : q
CV
= 0,97..0,98
(n treapta de priz direct ) ;
q
CV
= 0,92..0,94 ( n celelalte trepte ) ;
- transmisia principal : q
0
= 0,92..0,94 (
pentru transmisiile principale simple ) .
Deoarece valoarea global a randamentului
transmisiei depinde de numeroi factori a cror
influen este dificil de apreciat, n calcule se
opereaz cu valori adoptate din diagrama alturat.
Am adoptat q
t
= 0,85
3.2 Determinarea caracteristicii externe a motorului
Aprecierea motorului ca surs de energie pentru autopropulsarea autovehiculului se face
prin oferta de putere i moment. Oferta se exprim funcie de turaia arborelui motor printr-un
cmp de caracteristici P = f(n) i M = f(n) numite caracteristici de turaie. Domeniul de ofert
este limitat de caracteristica extern ( sau caracteristica la sarcin total ), care determin
posibilitile maxime ale motorului i n privina puterii i a momentului la fiecare turaie din
domeniul turaiilor de funcionare ale acestuia. Caracteristica extern se completeaz i cu curba
consumului specific de combustibil c
e
= f(n).
Dinamica autovehiculului
12
A. Alegerea tipului motorului i a mrimilor semnificative
Pentru propulsarea autovehiculelor, majoritatea motoarelor sunt motoare cu ardere
intern cu piston n micare de translaie. Existena unei mari varieti de motoare cu ardere
intern cu piston impune alegerea unor criterii de selecie bine definite. Opiunea pentru unul
dintre tipuri are n vedere n principal modelul, caracteristicile i destinaia autovehiculului.
n funcie e soluiile similare deja existente adopt un autoturism 44 cu motor ce
dezvolt o putere de
B. Determinarea puterii maxime
Din definirea condiiilor de autopropulsare, deplasarea cu vitez presupune dezvoltarea
unei fore la roat F
pmax
. Din definirea puterii ca produs ntre for i vitez, realizarea
performanei de vitez maxim, n condiiile prevzute, presupune pentru motor dezvoltarea unei
puteri:
P
v max
=
t
a
v A K v f G
q * 1000
* *
3
max max
+ - -
;
P
v max
=
85 . 0 * 1000
6 . 3
180
* 65 . 2 * 245 . 0
6 . 3
180
* 017 . 0 * 22150
3
|
.
|
\
|
+
=117.5 CP
C. Calculul caracteristicii externe a motorului
P
max
puterea maxim a motorului ;
M
max
momentul maxim al motorului .
Coeficienii relaiei se definesc astfel : Pentru evaluarea caracteristicii exterioare n mod
analitic se folosesc relaiile :
( ) ( )
( )
n
n P
n M si
n
n
n
n
n
n
P n P
p p p
9550
3 2
max
=
(
(
|
|
.
|
\
|
+
|
|
.
|
\
|
+ = | o unde :
P
max
puterea maxim a motorului ;
M(n) momentul funcie de turaie .
Coeficienii relaiei se definesc astfel :
( ) ( ) ( ) 2
3
;
1 * 2
1
;
1 * 2
* 2
;
1 * 2
* 4 3 ce
ca
ce ce
ce
ce
ce
=
= | o unde :
p
M
n
n
ce = este coeficientul de elasticitate al motorului ;
p
M
M
ca
max
= este coeficientul de adaptabilitate al motorului .
Cunoscnd turaia de putere maxim n
P
, turaia de moment maxim n
M
, puterea
motorului P
max
, momentul maxim M
max
i relaiile de definire a celorlalte mrimi avem :
Dinamica autovehiculului
13
22 , 1
2
0,5 - 3
ca ; 55 , 0
5400
3000
= = = = =
P
M
n
n
ce
Efectund calculele rezult coeficienii o, |, cu valorile :
o = 0.88 ; | = 1.22; = -1.11 .
Punnd condiia ca puterea la vitez maxim s corespund punctului de turaie maxim
se obine pentru puterea maxim a motorului din relaia de mai jos
(
(
|
|
.
|
\
|
+
|
|
.
|
\
|
+ =
3 2
max
p
M
p
M
p
M
M
n
n
n
n
n
n
P P | o
P
max
=
3 2
|
|
.
|
\
|
+
|
|
.
|
\
|
+
p
m
p
m
p
m
VMAX
n
n
n
n
n
n
P
| o
=
3 2
5400
3000
11 . 1
5400
3000
22 . 1
5400
3000
88 . 0
5 . 117
|
.
|
\
|
|
.
|
\
|
+
= 178kw
( )
( )
286
5400
172
9550 9550 = = =
n
n P
n M
.
Principalele date ale motorului sunt centralizate n tabelele urmtoare :
n
0
rot/min]
n
m
[rot/min]
n
p
[rot/min]
n max
[rot/min]
P max
[kW]
M max
[Nm]
M p
[Nm]
500 3000 4300
5000 178 385 314
Ce ca o |
0.55 1.222 0,88 1,22 -1,11
Determinarea mrimii rapoartelor de transmitere ale transmisie
Funcionarea automobilului n condiii normale de exploatare are loc n regim
tranzitoriu, gama rezistenelor la naintare fiind foarte mare. n aceste condiii rezult c la roile
motoare ale autovehiculului, necesarul de for de traciune i de putere la roat sunt cmpuri de
caracteristici avnd n abscis viteza aleas de conductor. Pentru ca s poat acoperi cu
automobilul acest cmp de caracteristici transmisia trebuie s ofere un asemenea cmp.
Situaiile care apar n timpul deplasrii unui autovehicul sunt:
a) motorul s echilibreze prin posibilitile proprii ntreaga gam de rezistene. Acest
lucru este posibil cnd puterea furnizat este constant n toate regimurile de deplasare. Dac
aceast valoare constant corespunde puterii maxime, se obine caracteristica ideal de traciune
dat de relaia :
F
R
* v = P
R
max
= ct.
Dinamica autovehiculului
14
unde:
F
R
= fora la roat;
v = viteza de deplasare;
P
R
max
= puterea maxim la roat
. b) viteza maxim este delimitat prin puterea maxim de autopropulsare:
max
max
max
Rv
R
F
P
v = unde F
R v max
este fora la roat necesar deplasrii cu viteza maxim de
performan.
c) cnd viteza = 0 , rezult o for la roat infinit. Ca urmare, la viteze mici, limita este
dat de aderena roilor cu calea, definit cu relaia F
R
max
| F
R
= e * G
ad
unde :
=0,7 coeficientul de aderen;
Gad = greutatea aderent, respectiv greutatea ce revine n condiii de demaraj roilor
motoare.
Determinarea valorii maxime a raportului de transmitere al transmisiei
Pentru valoarea maxim a raportului de transmitere, obinut cnd este cuplat prima
treapt de vitez n cutia de viteze, se pot formula ca performane dinamice independente sau
simultane urmtoarele: panta maxim sau rezistena specific a cii i acceleraia maxim la
pornirea de pe loc.
Performanele date prin forele la roat necesare pot fi formulate ca valori maxime cnd
forele la roat oferite prin transmisie au valori maxime, respectiv motorul funcioneaz la turaia
momentului maxim pe caracteristica extern ( M
max
) iar n transmisie este cuplat cel mai mare
raport de transmitere i
t
max
.
i
t
max
= i
cv1
* i
0
unde:
i
cv1
= raportul de transmitere n prima treapt a cutiei de viteze;
i
0
= raportul de transmitere a transmisiei principale .
Pentru ca fora la roat s fie situat n domeniu trebuie ca :
F
Rmax
s
ad
G - sau
n cazul autoturismelor 4 4 cu roi cuplate prin reductor distribuitor se definete un
raport de transmitere maxim al transmisiei cu reductor distribuitor cuplat n treapt reductoare (
i
t max R
) i un raport n cazul utilizrii cu o singur punte motoare ( i
t max
) .
Traciunea 4 4 cu treapt reductoare se consider raional mririi capacitii de trecere
pna la limita abordrii unor pante de 33-35
0
. cnd raportul de transmitere necesar este :
I
t max R
=
t
d R A
M
r G
q
max
max
Unde
max
= f cos
max R
o +sin
max R
o
Cu
max R
o = 33-35
0
Dinamica autovehiculului
15
I
t max R
=
85 . 0 375
36 . 0 57 . 0 22150
=14.33
Funcie de modul de organizare general a transmisiei i de parametrii constructivi ai
automobilului greutatea aderent are valoarea
G
ad
=G
a
*cos o =22150*0.96 = 21264
Greutatea aderent reprezint greutatea ce revine punii motoare la urcarea pantei
maxime, n cazul automobilului 44
Determinarea valorii minime a raportului de transmitere al transmisiei
Valoarea minim a raportului de transmitere a transmisiei este determinat din condiia
cinematic de realizare a vitezei maxime de performan, cnd motorul funcioneaz la turaia
maxim. Raportul de transmitere i
0
se realizeaz n puntea motoare, fie numai prin angrenajul
conic, fie prin angrenajul conic i celelalte angrenaje de reducerea turaiei cu funcionare
permanent montate n punte.
Calculul raportului de transmitere al transmisiei principale se realizeaz n condiiile de
vitez maxim, n ultima treapt a cutiei de viteze, valoarea raportului i
0
este dat de relaia:
i
0
=
max
max
30 v
n
r
r
t
=
3600 / 1000 * 180
5000
362 . 0 *
30
14 . 3
=3.78
Determinarea numrului de trepte pentru cutia de viteze i a mrimii rapoartelor de transmitere
ale transmisiei
Pentru determinarea numrului de trepte se utilizeaz dou metode: o metod grafic i o
metod analitic. Indiferent de metoda aleas se fac unele ipoteze simplificatoare precum:
schimbarea treptelor de vitez s se fac instantaneu, astfel nct viteza maxim n treapta
inferioar s fie egal, cu viteza minim n treapta superioar. Metoda recomandat de literatura
de specialitate este aceia a etajrii treptelor n progresie geometric. Pentru calculul numrului de
trepte se pornete de la principiul c viteza maxim, ntr-o treapt inferioar s fie egal cu viteza
minim ntr-o treapt superioar, folosind relaia:
V
a K
=
d
K
r
i i
*
*
0
e
Cunoscnd raportul de transmitere i
t max
ct i i
t min
se poate determina raportul de transmitere i
t min
:
i
CV 1
=
min
max
t
t
i
i
;
i
cv 1
=
6 . 3
17
=3.79
Dinamica autovehiculului
16
n cazul etajrii cutiei de viteze n progresie geometric, ntre valoarea maxim i
1
i
minim i
n
=1 n cutia de viteze snt necesare n trepte date de relaia:
n
M
CV
n
n
i
max
1
log
log
1+ > ; n
3000
4300
log
79 . 3 log
1+ > ; n
43 . 1 log
79 . 3 log
1+ > ; n 3 1+ > .7;unde n 4 > .7
Se adopt n=5
Alegerea final a mrimii numrului de trepte se face inndu-se cont de considerente
constructiv funcionale i de exploatare ale cutiei de viteze precum i de tipul i destinaia
automobilului. Astfel pentru autovehicule 44 n scopul unei bune adaptabiliti se utilizeaz de
obicei cutiile de viteze cu 5 trepte.
innd cont de tipul i destinaia autovehiculului, funcionarea economic a automobilului
presupune ca la astfel de regimuri de deplasare, motorul s funcioneze n zone cu consum
favorabil, respectiv la turaia medie economic, astfel s-a introdus a cincea treapt econoam,
calculat cu relaia:
i
cv5
=
r
i
ec
r
v
n
30
t
; i
cv5
= 362 . 0
145
3500
30
t
; i
cv5
=0,90
n
ec
=n
max
*0.6 =5000*0.7 =3500
v
i
=v
max
*0.7 =180*0.8 =145 km/h
Fiind determinat numrul de trepte i innd cont c i=1, ntr-o treapt K, raportul de
transmitere este dat de relaia:
i
CV k
=
1
1
n
k n
CV
i ; (k=1n)
Pentru treapta a-I-a; i
cv1
=3.79
Pentru treapta a-II-a; i
cv2
=2.71
Pentru treapta a-III-a; i
cv3
=1.64
Pentru treapta a-IV-a; i
cv4
=1.13
Pentru treapta a-V-a; i
cv5
=0.90
Determinarea numrului de trepte se poate face i pe cale analitic, meninndu-se
aceleai ipoteze ca i n cazul celeilalte metode lund ntr-un sistem de axe perpendiculare, unde
pe abscis se consider viteza de deplasare notat cu v, iar pe ordonat se consider viteza
unghiular e.
Dependena dintre viteza unghiular de rotaie a arborelui motorului i viteza de
deplasare a autovehiculului, ntr-o treapt oarecare k, cu raportul de transmitere i
cv k
, este:
; v *
r
i * i
r
cvk 0
= e
Pentru stabilirea numrului de trepte, mai nti trebuie s se cunoasc raportul de
transmitere pentru treapta I a cutiei de viteze ca s se poat determina celelalte rapoarte de
transmitere ale cutiei de viteze. Pentru aceasta trebuie ca funcionarea motorului pe
caracteristica exterioar s aib loc ntr-un interval de viteze unghiulare cuprins n domeniul de
stabilitate.
n plus se fac urmtoarele ipoteze: schimbarea treptelor de vitez nvecinate se fac
instantaneu, iar viteza maxim, ntr-o treapt este egal cu viteza minim n treapta imediat
superioar.
Dinamica autovehiculului
17
4 Evaluarea performanelor
4.1 Bilanul de traciune i caracteristica forei la roat
Performanele reprezint posibilitile maxime n privina, capacitii de autopropulsare,
capacitilor de sporire a vitezei, capacitilor de frnare i capacitilor de funcionare
economic din punct de vedere al consumului de combustibil. Cu ajutorul acestor studii se
stabilesc criteriile de calitate, prin care se apreciaz i se difereniaz autovehiculele. Criteriile
de apreciere ale performanelor dinamice se fac prin studii utiliznd caracteristica puterilor,
caracteristica de traciune i caracteristica dinamic.
Caracteristica forei la roat (F
r
)
Pentru fiecare punct al caracteristicii externe de funcionare a motorului, se poate
calcula, la mersul n fiecare treapt a cutiei de viteze, att fora la roat F
r
, ct i viteza de
deplasare a automobilului V. Fora la roat se calculeaz cu relaia:
F
r
=
d
0 cv tr
r
i * i * M * q
;
Iar viteza de deplasare a automobilului este :
r
cv 0
r r
r *
i * i
r v
e
= e = ;
n care , ,
r
e e sunt viteze unghiulare ale roii motoare i respectiv a arborelui motorului.
Prin caracteristica forei la roat se definete dependena grafic dintre fora la roat i viteza de
deplasare a automobilului. n cazul autovehiculului dat spre proiectare caracteristica forei la roat,
avnd n vedere relaiile de mai sus arat astfel:
Caracteristica forei la roat servete pentru calculul caracteristicii dinamice. Pentru o
singur treapt de viteze caracteristica forei la roat este prezentat n continuare:
V1 FR1 V2 FR2 V3 FR3 V4 FR4 V5 FR5
0.862398 15388.911 1.3136887 10102.367 1.9392547 6843.5392 2.9088821 4562.3595 4.0724349 3258.8282
1.2073572 15948.98 1.8391642 10470.037 2.7149566 7092.6054 4.0724349 4728.4036 5.7014089 3377.4311
1.5523164 16461.786 2.3646396 10806.679 3.4906585 7320.6533 5.2359878 4880.4355 7.3303829 3486.0254
1.8972756 16927.329 2.8901151 11112.294 4.2663604 7527.683 6.3995406 5018.4553 8.9593568 3584.6109
2.2422348 17345.609 3.4155906 11386.882 5.0420623 7713.6944 7.5630934 5142.4629 10.588331 3673.1878
2.587194 17716.626 3.9410661 11630.444 5.8177642 7878.6876 8.7266463 5252.4584 12.217305 3751.756
2.9321531 18040.379 4.4665415 11842.978 6.5934661 8022.6625 9.8901991 5348.4417 13.846279 3820.3155
3.2771123 18316.869 4.992017 12024.486 7.369168 8145.6192 11.053752 5430.4128 15.475253 3878.8663
3.6220715 18546.095 5.5174925 12174.966 8.1448698 8247.5577 12.217305 5498.3718 17.104227 3927.4084
Dinamica autovehiculului
18
3.9670307 18728.059 6.0429679 12294.42 8.9205717 8328.4779 13.380858 5552.3186 18.733201 3965.9419
4.3119899 18862.759 6.5684434 12382.847 9.6962736 8388.3799 14.54441 5592.2533 20.362175 3994.4666
4.6569491 18950.196 7.0939189 12440.246 10.471976 8427.2637 15.707963 5618.1758 21.991149 4012.9827
5.0019083 18990.37 7.6193944 12466.619 11.247677 8445.1292 16.871516 5630.0861 23.620123 4021.4901
5.1743879 18992.733 7.8821321 12468.171 11.635528 8446.1801 17.453293 5630.7867 24.43461 4021.9905
5.5193471 18962.012 8.4076076 12448.003 12.41123 8432.5182 18.616845 5621.6788 26.063583 4015.4849
5.8643063 18884.028 8.9330831 12396.809 13.186932 8397.8381 19.780398 5598.5588 27.692557 3998.9705
6.2092655 18758.78 9.4585585 12314.587 13.962634 8342.1398 20.943951 5561.4265 29.321531 3972.4475
6.5542247 18586.269 9.984034 12201.339 14.738336 8265.4232 22.107504 5510.2821 30.950505 3935.9158
6.8991839 18366.495 10.509509 12057.064 15.514038 8167.6884 23.271057 5445.1256 32.579479 3889.3754
7.2441431 18099.458 11.034985 11881.762 16.28974 8048.9353 24.43461 5365.9569 34.208453 3832.8263
7.5891023 17785.157 11.56046 11675.433 17.065442 7909.164 25.598162 5272.776 35.837427 3766.2686
7.9340614 17423.593 12.085936 11438.077 17.841143 7748.3745 26.761715 5165.583 37.466401 3689.7021
8.2790206 17014.766 12.611411 11169.694 18.616845 7566.5667 27.925268 5044.3778 39.095375 3603.127
8.6239798 16558.676 13.136887 10870.284 19.392547 7363.7407 29.088821 4909.1605 40.724349 3506.5432
8.968939 16055.323 13.662362 10539.847 20.168249 7139.8964 30.252374 4759.9309 42.353323 3399.9507
9.3138982 15504.706 14.187838 10178.383 20.943951 6895.0339 31.415927 4596.6893 43.982297 3283.3495
9.6588574 14906.826 14.713313 9785.8928 21.719653 6629.1532 32.579479 4419.4354 45.611271 3156.7396
10.003817 14261.683 15.238789 9362.3752 22.495355 6342.2542 33.743032 4228.1695 47.240245 3020.121
1
Pentru studiul performanelor automobilului la deplasarea pe un anumit drum
caracterizat de o nclinare longitudinal i de un coeficient de rezisten la rulare f,
caracteristica se completeaz cu bilanul de traciune dat de relaia:
F
R
= R
r
+ R
p
+ R
d
+ R
a
Pentru rezolvarea problemelor legate de dinamicitatea automobilului se propune
reprezentarea bilanului de traciune sub forma:
F
R
R
a
= R
r
+ R
p
+ R
d
Membrul stng al acestei relaii reprezint fora excedentar care poate fi folosit la
nvingerea rezistenei drumului i la accelerarea automobilului.
Calculul sub form tabelar a valorilor vitezei n cadrul treptei considerate este
reprezentat n tabelul urmtor.
Relaiile de utilizare la construirea acestui tabel sunt menionate anterior, iar rapoartele
de transmitere ale transmisiei automobilului sunt:
Pentru treapta a- I -a: i
cv1
= 5,53
Pentru treapta a- II -a: i
cv1
= 3,13
Pentru treapta a- III -a: i
cv1
= 1,77
Pentru treapta a- IV -a: i
cv1
= 1
Pentru treapta a- V -a: i
cv1
= 0,86
Pentru transmisia principal: i
0
=3,6
v4
[m/s]
Fex4
[N]
V4
[m/s]
Fex4
[N]
V4
[m/s]
Fex4
[N]
4.82 2231.55 16.98 2223.61 25.85 1715.65
6.17 2269.93 17.36 2210.34 26.91 1626.55
7.52 2298.49 18.42 2169.71 27.97 1531.39
8.87 2317.24 19.48 2123.02 29.03 1430.17
Dinamica autovehiculului
19
10.22 2326.17 20.54 2070.28 30.09 1322.89
11.57 2325.29 21.60 2011.47 31.15 1209.55
12.92 2314.59 22.67 1946.60 32.21 1090.16
14.27 2294.08 23.73 1875.68 33.28 964.70
15.63 2263.75 24.79 1798.70 34.72 783.86
Dinamica autovehiculului
20
0
2000
4000
6000
8000
10000
12000
14000
16000
0 5 10 15 20 25 30 35 40 45
F
o
a
[
N
]
Viteza [m/s]
Caracteristica forei la roat
FR1 FR2 FR3 FR4 FR5
Dinamica autovehiculului
21
1.5.2Bilanul de putere i caracteristica puterilor autovehiculului
Caracteristica puterilor
Caracteristica puterilor este reprezentarea grafic a bilanului de putere funcie de viteza
automobilului, pentru toate treptele de viteze. Bilanul de putere al automobilului reprezint
echilibrul dinamic puterea la roata P
R
i suma puterilor necesare nvingerii rezistenelor la
naintare, respectiv rezistena la rulare ( P
r
), rezistena la urcarea pantei ( P
p
), rezistena la
demarare ( R
d
) i rezistena aerului ( P
a
), dat de relaia :
P
R
=P*
t
q =P
r
+ P
a
+ P
p
+P
d
unde ;
P- puterea motorului
t
q - randamentul transmisiei
n cazul autovehiculului dat spre proiectare, avnd cinci rapoarte de transmitere ale
cutiei de viteze de mers nainte, reprezentarea grafic a caracteristicii puterilor n coordonate
putere-vitez arat astfel:
Relaiile de calcul pentru mrimile din componena tabelelor urmtoare sunt:
P
r
= ; R *
1000
v
r
P
p
=
p
R *
1000
v
;
P
a
= ; R *
1000
v
a
P
R
=
R
F *
1000
v
;
v
1
[m/s]
PR
1
[KW]
v
2
[m/s]
PR
2
[KW]
v
3
[m/s]
PR
3
[KW]
v
4
[m/s]
PR
4
[KW]
v
5
[m/s]
PR5
[KW]
0.87163 10.88 1.54163 10.88 2.72664 10.88 4.82253 10.88 5.60759 10.88
1.11569 14.25 1.97329 14.25 3.4901 14.25 6.17284 14.25 7.17772 14.25
1.35974 17.73 2.40494 17.73 4.25356 17.73 7.52315 17.73 8.74785 17.73
1.6038 21.27 2.8366 21.27 5.01701 21.27 8.87346 21.27 10.318 21.27
1.84786 24.87 3.26825 24.87 5.78047 24.87 10.2238 24.87 11.8881 24.87
2.09191 28.49 3.69991 28.49 6.54393 28.49 11.5741 28.49 13.4582 28.49
2.33597 32.12 4.13157 32.12 7.30739 32.12 12.9244 32.12 15.0284 32.12
2.58003 35.71 4.56322 35.71 8.07085 35.71 14.2747 35.71 16.5985 35.71
2.82408 39.26 4.99488 39.26 8.83431 39.26 15.625 39.26 18.1686 39.26
3.06814 42.74 5.42654 42.74 9.59777 42.74 16.9753 42.74 19.7387 42.74
3.13787 43.71 5.54987 43.71 9.8159 43.71 17.3611 43.71 20.1873 43.71
3.32963 46.35 5.88902 46.35 10.4158 46.35 18.4221 46.35 21.421 46.35
3.52139 48.91 6.22818 48.91 11.0156 48.91 19.483 48.91 22.6547 48.91
3.71315 51.38 6.56734 51.38 11.6155 51.38 20.544 51.38 23.8884 51.38
Dinamica autovehiculului
22
3.90491 53.75 6.9065 53.75 12.2153 53.75 21.6049 53.75 25.122 53.75
4.09666 56.00 7.24566 56.00 12.8152 56.00 22.6659 56.00 26.3557 56.00
4.28842 58.13 7.58482 58.13 13.4151 58.13 23.7269 58.13 27.5894 58.13
4.48018 60.13 7.92398 60.13 14.0149 60.13 24.7878 60.13 28.823 60.13
4.67194 61.97 8.26313 61.97 14.6148 61.97 25.8488 61.97 30.0567 61.97
4.8637 63.65 8.60229 63.65 15.2146 63.65 26.9097 63.65 31.2904 63.65
5.05546 65.16 8.94145 65.16 15.8145 65.16 27.9707 65.16 32.524 65.16
5.24722 66.49 9.28061 66.49 16.4144 66.49 29.0316 66.49 33.7577 66.49
5.43898 67.62 9.61977 67.62 17.0142 67.62 30.0926 67.62 34.9914 67.62
5.63073 68.54 9.95893 68.54 17.6141 68.54 31.1535 68.54 36.2251 68.54
5.82249 69.24 10.2981 69.24 18.2139 69.24 32.2145 69.24 37.4587 69.24
6.01425 69.70 10.6372 69.70 18.8138 69.70 33.2755 69.70 38.6924 69.70
6.20601 69.92 10.9764 69.92 19.4137 69.92 34.3364 69.92 39.9261 69.92
6.27574 69.94 11.0997 69.94 19.6318 69.94 34.7222 69.94 40.3747 69.94
Deoarece studiul performanelor automobilului se face de obicei n funcie de
deplasarea cu viteze constante, pe o cale orizontal n stare bun se noteaz cu puterea
consumat pentru nvingerea rezistenei la rulare pe o cale orizontal bun considerat cu un
coeficient al rezistenei la rulare f = ct. pentru viteze uzuale.
Unde P
ro
=G
a
* f *v.
Bilanul de putere va fi de forma:
P = P
R
(P
ro
+ P
a
) = P
ex.
P
ex
este o putere numit excedentar fa de deplasarea cu vitez constant pe o cale
dat.
Aceast putere este utilizat de automobil n scopul sporirii vitezei maxime, nvingerea
rezistenelor maxime ale cii de rulare, sporirea vitezei i nvingerea rezistenelor cii.
Puterea utilizat la deplasarea cu vitez constant pe o cale orizontal este numit P
rez
i
se manifest n orice condiii (pentru nvingerea rezistenei aerului i a rezistenei la rulare apare
un consum permanent de putere).
Studiul performanelor dinamice cu ajutorul caracteristicii puterilor se face funcie de
modul de utilizare a puterii disponibile.
Pentru o reprezentare grafic s-a folosit expresia bilanului de putere dat de relaia:
P
R
= P*
t
q =P
r
+ P
a
+ P
p
+ P
d
dat sub forma
P
ex
= P
d
+
r
P P A = P
R
P
rez
unde
P
rez
= P
a
+ P
ro
i ) F f ( G P P P
coa a r ro r
= = A
f - coeficient al rezistenei de rulare
Dinamica autovehiculului
23
v
4
[m/s]
Pa
4
[kW]
PR
4
[kW]
Pr
4
[kW]
Pcsi
[kW]
Pa+Pr
[kW]
4.82 11.82 10.88 3.91 0.39 4.02
6.17 15.49 14.25 5.00 0.50 5.24
7.52 19.27 17.73 6.09 0.61 6.53
8.87 23.12 21.27 7.19 0.72 7.90
10.22 27.03 24.87 8.28 0.83 9.37
11.57 30.97 28.49 9.38 0.94 10.96
12.92 34.91 32.12 10.47 1.05 12.67
14.27 38.82 35.71 11.56 1.16 14.53
15.63 42.68 39.26 12.66 1.27 16.55
16.98 46.45 42.74 13.75 1.38 18.74
17.36 47.51 43.71 14.06 1.41 19.40
18.42 50.38 46.35 14.92 1.49 21.30
19.48 53.16 48.91 15.78 1.58 23.33
20.54 55.85 51.38 16.64 1.66 25.49
21.60 58.42 53.75 17.50 1.75 27.79
22.67 60.87 56.00 18.36 1.84 30.24
23.73 63.19 58.13 19.22 1.92 32.85
24.79 65.35 60.13 20.08 2.01 35.62
25.85 67.36 61.97 20.94 2.09 38.57
26.91 69.19 63.65 21.80 2.18 41.69
27.97 70.83 65.16 22.66 2.27 44.99
29.03 72.27 66.49 23.52 2.35 48.49
30.09 73.50 67.62 24.38 2.44 52.19
31.15 74.50 68.54 25.23 2.52 56.09
32.21 75.26 69.24 26.09 2.61 60.22
33.28 75.76 69.70 26.95 2.70 64.56
34.34 76.00 69.92 27.81 2.78 69.13
34.72 76.02 69.94 28.13 2.81 70.85
Dinamica autovehiculului
24
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
0 5 10 15 20 25 30 35 40
P
u
t
e
r
e
[
k
W
]
Viteza [m/s]
Caracteristica Puterilor
PR1 PR2 PR3 PR4 PR5
Dinamica autovehiculului
25
0.00
10.00
20.00
30.00
40.00
50.00
60.00
70.00
80.00
0 5 10 15 20 25 30 35 40
P
u
t
e
r
e
[
k
W
]
Viteza [m/s]
Bilanul de Putere
P PR Pr Pcsi Pa+Pr
Dinamica autovehiculului
26
A. Determinarea caracteristicii acceleraiilor
Din ecuaia de definiie a factorului dinamic, se poate deduce expresia acceleraiei de micare a
automobilului:
) D (
g
dt
dv
a
o
= = , pentru fiecare treapt.
Valorile acceleraiei vor depinde de drumul pe care ruleaz automobilul, caracterizat
prin rezistena specific , de regul demarajul automobilului se studiaz la deplasarea pe
drum orizontal astfel =f.
Caracteristica acceleraiilor reprezint dependena grafic dintre acceleraia
automobilului msurat n m/s
2
, i viteza de deplasare a automobilului v
a
.
Relaiile utilizate la construirea acestui tabel sunt cele menionate anterior, iar rapoartele
de transmitere ale transmisie autobehiculului sunt
Pentru treapta a- I -a: i
cv1
= 5,53
Pentru treapta a- II -a: i
cv1
= 3,13
Pentru treapta a- III -a: i
cv1
= 1,77
Pentru treapta a- IV -a: i
cv1
= 1
Pentru treapta a- V -a: i
cv1
= 0,86
Pentru transmisia principal: i
0
=3,6
v1
[m/s]
a
1
m/s
2
v2
[m/s]
a
2
[m/s]
v3
[m/s]
a
3
[m/s
2
]
v4
[m/s
2
]
a
4
[m/s
2
]
v5
[m/s]
a
5
[m/s
2
]
0.872 1.324 1.542 1.040 2.727 0.622 4.823 0.295 5.608 0.230
1.116 1.357 1.973 1.068 3.490 0.639 6.173 0.303 7.178 0.235
1.360 1.387 2.405 1.092 4.254 0.654 7.523 0.309 8.748 0.238
1.604 1.413 2.837 1.113 5.017 0.667 8.873 0.313 10.318 0.239
1.848 1.435 3.268 1.131 5.780 0.678 10.224 0.315 11.888 0.238
2.092 1.453 3.700 1.146 6.544 0.686 11.574 0.315 13.458 0.235
2.336 1.468 4.132 1.158 7.307 0.692 12.924 0.312 15.028 0.229
2.580 1.478 4.563 1.166 8.071 0.696 14.275 0.308 16.598 0.222
2.824 1.485 4.995 1.171 8.834 0.697 15.625 0.302 18.169 0.212
3.068 1.488 5.427 1.172 9.598 0.696 16.975 0.294 19.739 0.200
3.138 1.488 5.550 1.172 9.816 0.695 17.361 0.291 20.187 0.197
3.330 1.486 5.889 1.171 10.416 0.692 18.422 0.282 21.421 0.185
3.521 1.483 6.228 1.167 11.016 0.687 19.483 0.273 22.655 0.173
3.713 1.477 6.567 1.161 11.615 0.681 20.544 0.262 23.888 0.159
3.905 1.468 6.907 1.154 12.215 0.674 21.605 0.250 25.122 0.143
4.097 1.457 7.246 1.144 12.815 0.665 22.666 0.236 26.356 0.127
4.288 1.444 7.585 1.132 13.415 0.655 23.727 0.221 27.589 0.109
4.480 1.429 7.924 1.119 14.015 0.643 24.788 0.205 28.823 0.090
4.672 1.411 8.263 1.103 14.615 0.630 25.849 0.188 30.057 0.069
4.864 1.391 8.602 1.086 15.215 0.615 26.910 0.170 31.290 0.047
5.055 1.368 8.941 1.066 15.815 0.599 27.971 0.150 32.524 0.024
5.247 1.343 9.281 1.044 16.414 0.581 29.032 0.129 33.758 -0.001
Dinamica autovehiculului
27
5.439 1.315 9.620 1.021 17.014 0.562 30.093 0.107 34.991 -0.027
5.631 1.286 9.959 0.995 17.614 0.542 31.154 0.083 36.225 -0.054
5.822 1.254 10.298 0.967 18.214 0.520 32.215 0.058 37.459 -0.082
6.014 1.219 10.637 0.938 18.814 0.497 33.275 0.032 38.692 -0.112
6.206 1.182 10.976 0.906 19.414 0.472 34.336 0.005 39.926 -0.143
6.276 1.168 11.100 0.894 19.632 0.462 34.722 0.005 40.375 -0.155
Dinamica autovehiculului
28
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
0 5 10 15 20 25 30 35 40 45
a
c
c
e
l
e
r
a
i
a
[
m
/
s
^
2
]
viteza [m/s]
Caracteristica acceleraiilor
a1 a2 a3 a4 a5
Dinamica autovehiculului
29
B. Determinarea timpului de demarare
Prin timp de demarare se nelege timpul necesar de cretere a vitezei automobilului ntre viteza
minim n treapta nti a cutiei de viteze i viteza maxim de deplasare n ultima treapt, fcnd
ipotezele c motorul funcioneaz pe caracteristica extern i c schimbarea treptelor se face
instantaneu.
Pentru calculul timpului de demaraj se pornete de la definiia acceleraiei:
a=
dt
dv
De unde se deduce expresia timpului elementar:
a
dv
dt = ;
ntruct pentru acceleraie nu exist o funcie analitic de variaie n raport cu viteza, se
recurge prin integrare, la diagrama acceleraiei. La viteza maxim a automobilului, acceleraia
fiind nul, inversul acceleraiei va fi infinit. Astfel expresia timpului de demaraj va fi:
}
=
max
1 min
V * 9 , 0
v
d
a
dv
t ;
Pentru calcularea timpului de demaraj este necesar calcularea inversului acceleraiei.
Deoarece inversul acceleraiei tinde la infinit pentru viteza care tinde la viteza maxim, acesta se
calculeaz pentru o valoare egal cu 0,9 din viteza maxim.
va1 1/a1 va2 [m/s] 1/a2 Va3
[m/s]
1/a3 Va4
m/s
1/a4 va5 1/a5
0.87 0.76 1.54 0.96 2.73 1.61 4.82 3.39 5.61 4.36
1.12 0.74 1.97 0.94 3.49 1.56 6.17 3.30 7.18 4.26
1.36 0.72 2.40 0.92 4.25 1.53 7.52 3.23 8.75 4.20
1.60 0.71 2.84 0.90 5.02 1.50 8.87 3.19 10.32 4.18
1.85 0.70 3.27 0.88 5.78 1.48 10.22 3.18 11.89 4.20
2.09 0.69 3.70 0.87 6.54 1.46 11.57 3.18 13.46 4.26
2.34 0.68 4.13 0.86 7.31 1.45 12.92 3.20 15.03 4.36
2.58 0.68 4.56 0.86 8.07 1.44 14.27 3.24 16.60 4.51
2.82 0.67 4.99 0.85 8.83 1.44 15.63 3.31 18.17 4.71
3.07 0.67 5.43 0.85 9.60 1.44 16.98 3.41 19.74 4.99
3.14 0.67 5.55 0.85 9.82 1.44 17.36 3.44 20.19 5.09
3.33 0.67 5.89 0.85 10.42 1.45 18.42 3.54 21.42 5.40
3.52 0.67 6.23 0.86 11.02 1.46 19.48 3.67 22.65 5.79
3.71 0.68 6.57 0.86 11.62 1.47 20.54 3.82 23.89 6.30
3.90 0.68 6.91 0.87 12.22 1.48 21.60 4.01 25.12 6.97
4.10 0.69 7.25 0.87 12.82 1.50 22.67 4.24 26.36 7.89
4.29 0.69 7.58 0.88 13.42 1.53 23.73 4.52 27.59 9.19
Dinamica autovehiculului
30
4.48 0.70 7.92 0.89 14.01 1.56 24.79 4.87 28.82 11.16
4.67 0.71 8.26 0.91 14.61 1.59 25.85 5.32 30.06 14.49
4.86 0.72 8.60 0.92 15.21 1.63 26.91 5.90 31.29 21.23
5.06 0.73 8.94 0.94 15.81 1.67 27.97 6.67 32.52 41.90
5.25 0.74 9.28 0.96 16.41 1.72 29.03 7.76 33.76 -1423.67
5.44 0.76 9.62 0.98 17.01 1.78 30.09 9.39 34.99 -37.60
5.63 0.78 9.96 1.00 17.61 1.85 31.15 12.05 36.23 -18.58
5.82 0.80 10.30 1.03 18.21 1.92 32.21 17.19 37.46 -12.14
6.01 0.82 10.64 1.07 18.81 2.01 33.28 31.12 38.69 -8.91
6.21 0.85 10.98 1.10 19.41 2.12 34.34 207.68 39.93 -6.97
6.28 0.86 11.10 1.12 19.63 2.16 34.72 184.20 40.37 -6.45
nlocuind n relaie se calculeaz timpul de demaraj, necesar atingerii vitezei de 100
km/h (n treapta a IV a, a cutiei de viteze) , pentru un drum orizontal cu f=0,02, i sarcina
maxim Ga=45000 N.
v4
[m/s]
td
[s]
v
[m/s]
td
[S]
3.32963 0.04386 9.28061 1.73369
3.52139 0.08783 11.0156 2.59211
3.71315 0.13198 11.6155 2.8915
3.90491 0.17639 12.2153 3.19419
4.09666 0.22112 12.8152 3.50091
4.28842 0.26626 13.4151 3.81248
4.48018 0.31189 14.0149 4.12974
4.67194 0.35811 14.6148 4.45367
4.8637 0.40499 15.2146 4.78531
5.05546 0.45266 15.8145 5.12588
5.24722 0.50121 16.4144 5.47673
5.43898 0.55707 19.483 9.3028
5.54987 0.58953 20.544 10.681
5.88902 0.68948 21.6049 12.1266
6.22818 0.79027 22.6659 13.6548
6.56734 0.89209 23.7269 15.2846
7.92398 1.30434 24.7878 17.0414
8.26313 1.40887 25.8488 18.9592
8.60229 1.51509 26.9097 21.0863
8.94145 1.62327 27.77 23.494
Dinamica autovehiculului
31
0
5
10
15
20
25
0 5 10 15 20 25 30
T
i
m
p
[
s
]
Viteza [m/s]
Caracteristica timpului
de demarare
Dinamica autovehiculului
32
B. Caracteristica spaiului de demaraj
Prin spaiului de demaraj se nelege distana parcurs de automobil n timpul demarajului.
Pentru calculul spaiului de demaraj se folosete relaia de definiie a vitezei:
v=
dt
ds
;
de unde se deduce expresia spaiului elementar:
ds= dt * v ,
Din relaia de mai sus se observ cunoaterii funciei de dependen a vitezei fa de timp. Astfel
timpul necesar pentru demaraj de la viteza v
min1
la viteza v
1
este:
t
1
=
med 1
a
1
v |
.
|
\
|
A ;
Dac ntr-un sistem de axe se i-a n abscis vitezele de demaraj, iar n ordonat timpul
necesar de demaraj pentru fiecare vitez, rezult reprezentarea grafic a funciei v=v(t). Spaiul,
de demaraj total S
d
se exprim prin relaia:
}
=
td
0
d
; dt ) t ( v S
Graficul funciei determinate este prezentat n continuare:
v
[m/s]
sd
[m]
v
[m/s]
sd
[m]
3.32963 0.12518 9.28061 9.91234
3.52139 0.25789 11.0156 18.0175
3.71315 0.39841 11.6155 20.9982
3.90491 0.54704 12.2153 24.1675
4.09666 0.70412 12.8152 27.5367
4.28842 0.87005 13.4151 31.1192
4.48018 1.04528 14.0149 34.9305
4.67194 1.23034 14.6148 38.9882
4.8637 1.4258 15.2146 43.3133
5.05546 1.63234 15.8145 47.9298
5.24722 1.8507 16.4144 52.8661
5.43898 2.11115 19.483 116.76
5.54987 2.26557 20.544 141.029
5.88902 2.77007 21.6049 167.8
6.22818 3.30811 22.6659 197.489
6.56734 3.88128 23.7269 230.635
7.92398 6.68131 24.7878 267.961
8.26313 7.42162 25.8488 310.452
8.60229 8.20485 26.9097 359.515
8.94145 9.03395 27.77 417.239
Dinamica autovehiculului
33
0
50
100
150
200
250
300
350
400
450
0 5 10 15 20 25 30
S
p
a
i
u
l
d
e
d
e
m
a
r
a
r
e
[
m
]
Viteza [m/s]
Caracteristica spaiului
de demarare
Dinamica autovehiculului
34
1.5.5 Caracteristica de frnare
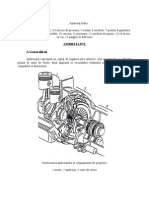
Calculul i construcia Ambreajului
Alegerea tipului constructiv
Ambreiajul este inclus n transmisia automobilului n scopul compensrii
principalelor dezavantaje ale motorului,care constau n imposibilitatea pornirii sub
sarcin,extstena unor zone de funcionare instabil i mersul neuniform al arborelui
cotit.Ambreajul realizeaz cuplarea i decuplarea transmisiei de motor.Ambreiajul cuprinde
elemente solidare cu arborele cotit al motorului i elemente solidare cu transmisia.
Comanda de decuplare i cuplare a celor dou pri se face prin sistemul de acionare
.Cerinele pe care trebuie s le ndeplineasc acest sistem sunt :
-transmiterea momentului motor maxim s se fac fr patinare n condiii normale
de funcionare .
-s se asigure cuplarea lin i complet .
-s asigure alunecri care s evite suprasolicitarea organelor tramsimisiei sau a
arborelui motor .
-s permit o decuplare rapid i total cu eforturi reduse din partea conductorului.
-cldura care apare n urma patinrii suprafeelor prii conduse n raport cu cele
ale prii conductoare s fie cedat cu uurin mediului.
n construcia de autoturisme se ntlnesc mai multe tipuri de ambreiaje care, dup
modul de transmitere al momentului motor ,se clasific astfel .
-ambreiaje mecanice .
-ambreiaje hidrodinamice
-ambreiaje electromagnetice
Ambreiajele mecanice pot fi cu arcuri elicoidale, dispuse periferic sau cu arc
diafragm.Datorit momentelor relativ mici de transmis,la autoturisme i a gabaritului
redus,ambreiajul mecanic cu arc central tip diafragm a cptat o larg rspndire .
Ambreiajele cu arc central tip diafragm necesit o for de cuplare mai mic
,respectiv o acionare mai uoar .De asemeni,fora de apsare a arcului tip diafragm se
menine constant,odat cu uzura garniturilor de frecare ,eliminndu-se tendina de patinare
,pe msura uzurii datorit scderii forei de apsare a arcurilor elicoidale .
Dinamica autovehiculului
35
n urma acestui studiu i avnd n vedere autoturismul impus ,ct i soluiile
similare,adopt ambreiaj mecanic monodisc uscat,cu arc central tip diafragm .
Alegerea valorilor principalilor parametri constructivi i de funcionare
Coeficientul de siguran - |
Transmiterea integral a momentului maxim al motorului n orice condiii este
posibil c momentul capabil (momentul de calcul ) al ambreiajului Ma este mai mare dect
momentul maxim al motorului Mmax .n calculul de predimensionare se introduce un
coeficient de siguran beta care ine cont de acest lucru .
Pentru autoturisme ,n cazul ambreiajului mecanic,se recomand .
| =1,6*1,75. Adopt | =1,3
Ma= | Mmax=1,6169=271 N*m.
Presiunea specific - p
s
La ambreiajele mecanice ,legtura de cuplare este determinat de mrimea forelor
de frecare ,ce iau natere n suprafeele de frecare ale prilor conduse i conductoare,puse n
contact forat prin intermediul unor fore normmale de apsare .Raportul dintre fora de
apsare a arcurilor de presiune F i mrimea suprafeei de frecare a ambreiajului definete
presiunea specific a ambreiajului.
P
s=
A
F
;
n funcie de tipul cuplurilor de frecare ,presiunea specific se admite ntre limitele :
P
s
=1,5 2 N/mm
2
; se adopt pentru calcul P
s=
1,5 N/mm
2
Fizic
valoarea maxim a presiunii este limitat de tennsiunea admisibil de strivire a materialului
garniturilor.
Creterea de temperatur la cuplare
n procesul de cuplare i decuplare al ambreiajului ,o parte din lucrul mecanic de
patinare al ambreiajului,se transform n cldur ,nclzind piesele metalice ale
ambreiajului,din aceast cauz garniturile de frecare funcioneaz la temperaturi ridicate.Ca
urmare a cldurii preluate, are loc o scdere a durabilitii de dou,trei ori .Pentru meninerea
calitilor de funcionare n domeniul de durabilitate ,se admite o cretere a temperaturii de
maxim 10-15C;
np c
L
t
= A
unde :
= At creterea de temperatur
=coeficient ce exprim a cta parte din lucrul mecanic de frecare este cheltuit
pentru nclzirea piesei verificate ; =0,5,pentru discul de presiune exterior la ambreiaje
monodisc
c=cldura specific a pieselor ce se nclzesc c=500 J/Kg C
np=masa pieselor ce se verific
Dinamica autovehiculului
36
Ambreiajul se consider bun din punct de vedere al nclzirii i rezistenei la uzur
dac
creterea de temperatur se ncadreaz n limitele t A =8-15 C
Dimensionarea suprafeelor de frecare ale ambreiajelor
Pentru a putea transmite momentul motor maxim,ambreiajul are nevoie de o suprafa de
frecare a crei mrime se determin cu relaia :
A= (Rc t
2
- Ri
2
) ,
Unde.
R
e
-raza maxim
Ri-raza minim
Raportul dintre Rmin i Rmax are o valoare cuprins ntre 0,53-0,75 ,se adopt
c=0,53.Cunoscnd coficientul c ,presiunea specific p
s
,I=2,I fiind numrul suprafeelor de
frecare ,rezult raza maxim ;
A= (Rc t
2
-Ri
2
)
Unde:
Re-raza maxim;
Ri-raza minim
=2,53,adopt =3;
-coeficient de frecare,se adopt =0,3.
Raportul ntre Rmin i Rmax are o valoare cuprins ntre 0,53-0,75,adopt c=0,65.Cunoscnd
coeficientul c,presiunea specific p
s
,i=2;i,fiind numrul suprafeelor de frecare rezultnd raza
maxim:
Re=
( )i c
M
1
max *
t
=
( ) 10 * 2 * 65 , 0 1
10 * 169 * 3
2
3
t
=116mm
tiind raza maxim i coeficientul c vom putea determina raza minim cu relaia : Ri=Rec
Ri=1160,6
Ri=69.6mm. R
e
=116mm
Cu aceste valori determinate ,vom putea obine aria suprafeei de frecare innd cont derelaia
urmtoare:
A= ( )
2 2
i e
R R t = ( )
2 2
6 . 69 116 t =27041 mm
2
Se adopt urmtoarele dimensiuni principale conform STAS 7793-67:
Re=112.5 mm
Ri=75 mm
Grosimea g=3,5 mm.
n acest caz aria de frecare va fi:
A=t (Re
2
-Ri
2
)=t (112.5
2
-75
2
)=2314.1mm
2
Pentru a carecteriza solicitrile ambreiajului i rezistena lui la uzur utilizm ca
parametri de apreciere lucrul mecanic specific Ls,definit ca raportul ntre lucrul mecanic de
patinare L,i suprafaa de frecare,A.
Dinamica autovehiculului
37
L
s
=
A
L
; pentru autoturisme L
s=
100120daNmm
Lucrul mecanic de patinare se calculeaz n cazul pornirii din loc a autoturismului cu
relaia:
L e =
m
2
0,5m
a
0
2
1
2
*i i
r
cv
r
=43848,3*0,5*1620* =
2 2
2
5 . 3 * 08 . 3
3 . 0
4976.2 daNmm
m
e = = =
30
2000 *
30
* t t n
209,4 rad/s
m
a
-masa automobilului m
a
=1620 Kg
r
r
-raza de rulare r
r
=0,3 mm
i
cv1
-raportul de transmitere n treapta I acutiei de viteze
i
0
-raportul de transmitere principal
L
s
=
A
L
=
27041
2 . 4976
=
1,27daNm/cm
2
Calculul prii conductoare
Discul de presiune
Discurile de presiune sunt dimensionate funcie de misiunile ndeplinite reprezentnd o
suprafa de contact cu frecare pentru cuplare.
Pentru asigurarea contactului prin frecare ,discul de presiune n forma unui cilindru are
urmtoarele dimensiuni:
Red=Re+(35)mm=112.5+4=116.5mm
Red-raza exterioar a discului
Rid=Ri-(35)mm=75-4=71mm
Rid-raza interioar a discului
Arcurile de presiune
Arcurile sunt elemente ale prii conductoare care dezvolt fora pentru meninerea strii
cuplate a ambreiajului .Fora necesar de apsare normal pe suprafaa de frecare este .
F=
Rmed i
Ma
=
Unde.
-coeficientul de frecare.Pentru calcul adopt =0,3
M
a
= =
max
* M | 1,6*169=271
i-numrul suprafeelor aflate n contact i=2
R
me=
2
Re Ri +
| | mm
Rmed=
2
75 5 . 112 +
=93.75mm
F=
73 * 2 * 3 , 0
10 * 271
3
=4828.5N
Dinamica autovehiculului
38
Momentele limit ce solicit arcurile i care limiteaz rigiditatea lor maxim sunt
Mmax=169
i
Mp=
0
*i i
rd Gad
CV
=
5 . 3 . 08 . 3
3 . 0 4 . 0 8075
=120Nm
Fora Fa care solicit un arc al izolatorului ,considernd c arcurile particip n mod egal
la preluarea Mmax este:
Fa=
Ra Za
M
max
| | N
Unde:
Za-numrul de arcuri ale izolatorului
Za=10
Ra-raza de apsare a arcurilor
Ra=60mm
Fa= =
06 . 0 10
169
323 N
Se adopt pentru arcuri urmtoarele dimensiuni.
D- 17.5 mm-diametrul exterior
Dm- 12 mm-diametrul mediu al arcului
h-39,7 nlimea de lucru a arcului
d-3.5mm diametrul srmei n mm
Calculul prii conduse
Arborele ambreiajului
Arborele ambreiajului este solicitat la torsiune i ncovoiere,deoarece solicitarea
principal este de torsiune ,pentru dimensionare avem :
d
i
3
2 , 0
max 2 , 1
=
=
at
M
t
|
unde.
/ 120 ... 100 N = t m
2
-efortul unitar admisibil la torsiune,se adoptt =100 N/mm
2
d
i
3
100 2 . 0
1000 169 6 . 1 2 . 1
=25mm
Din STAS 6858-80 se adopt caneluri n evolven cu centrare pe flancuri
m-1,25
Z-22
d
i
-27 mm
d
e
-30 mm
L=40 mm
b-2,685
Cu aceste dimensiuni adoptate se verific la solicitarea de forfecare i la strivire:
o
sa=
t
ja=
2030N/mm
2
Dinamica autovehiculului
39
-forfecare t
ja
=
( )
i e
d d b L Z
M
+
max 4
=
( ) 30 27 685 . 2 * 40 * 22
169 * 4
+
=6 N/mm
2
-strivire o
sa=
) (
2 2
max 8
i e
d d L Z
M
=
( )
2 2
27 30 40 * 22
169 * 8
=10.3 N/mm
2
.Butucul discului condus
De=30.5 mm
Di= 27.5 mm
Z=22 mm
L= 40 mm
Butucul se verific la forfecare i nconvoiere i la strivire.
t
fb
=
) ( i D De L b Z
M
+
max 4
=
( ) 5 . 30 5 . 27 685 . 2 * 40 * 22
10 * 169 * 4
3
+
=5.73 N/mm
2
o
fb=
) (
2 2
5 . 22 25
max 8
L Z
M
=
( )
2 2
3
5 . 27 5 . 30 * 40 * 22
10 * 169 * 8
=10.3 t
fb
=o
fb
=2030N/mm
2
Calculul elementelor elastice suplimentare
M
c=
238
1 5 , 3
3 , 0 4 , 0 8075
*
4 0 4 0
=
=
=
cv cv
i i
rd Gad
i i
mf
Nm
Dac R-este raza medie de dispunere a arcului atunci:
F= =
R Z
Mc
06 . 0 * 10
238
=397 N
Momentul de pretensionare va avea valoarea :
M
pr
=Mmax* 25
100
15
169
100
15
= = Nm
Fora de pretensionare asupra unui arc va fi:
F
pr
= =
Ra Za
Mpr
06 . 0 * 10
25
=42.2 N
n stare blocat arcul va avea lungimea :
Li=( ) 5 . 0 n *d=(10.-0,5)*3.5=34.2
Lungimea minim a arcului sub aciunea momentului maxim va fi:
Lmin=Li+js*n
Unde: js=jocul dintre spire js=0,009
Lmin=34.2+0,09*10=35.04
Sgeata pe care o are arcul sub aciunea Mmax va fi:
n
=
) ( ( )
=
=
4 4
3
4
3
4 * 10 * 8
10 * 12 * 2 . 42 323 * 8
*
* max 8
d G
n D r Fp F
m
5.2
Sgeata pe care o are arcul sub aciunea p va fi:
r
=
) (
4
3
*
* 8
d G
n Dm r Fp Fp
=
( )
4 4
3
4 * 10 * 8
10 * 16 * 2 . 42 323 * 8
=7.15
Dinamica autovehiculului
40
Fp= =
Ra Za
Mp
* 06 . 0 * . 10
120
=362,2 N
Lungimea ferestrei Lf din butuc va fi:
L
f
=L
min
+
n
,L
f
=35.04+5.23 L
f
=40.27 ,se adopt L
f=
40
Diametrul limitatorului se recomand d=1012 mm se adopt d=10 mm.Valoarea tieturii
din butuc va fi: =d+ n+
r
=7.15+5.23+10=22 mm
Verificarea arcului la torsiune
= =
3
*
* * * 8
d
F D K
a m
t
t
unde, K-coeficient de corecie,
K=1,4
1000 ... 800 =
at
t N/mm
2
322 N/mm
2
Dinamica autovehiculului
41
Studiul soluiilor similare
Land
Rover
Freelander
Mitshubischi
Pajero
Toyota
L450
Honda
CR-V
Daewo
Musso
Ford
Expedition
Caroserie 4 4 4 4 4 4 4 4 4 4 4 4
Nr ui 5 5 5 5 5 5
Nr. locuri 5 5 5 5 5 5
Dinamica autovehiculului
42
Opel
Frontera
Limited
Toyota
L-450
Nissan
Terrano
II
Citroen
Visa
Mitsubishi
Pajero
3.2DI-D
Subaru
Forester
Caroserie 4 4 4 4 4 4 4 4 4 4 4 4
Nr ui 5 5 2 5 3 5
Nr. locuri 5 5 5 5 5 5
Cilindree 3465cmc 2874cmc 2690cmc 2400cmc 3497cmc 1994cmc
Alezaj curs 8089 7983 7779,5 7577 8989 9090
Lungime 4658 mm 5642 mm 4700 mm 4300mm 4780 mm 4460 mm
Lime 1787 mm 1850 mm 1820 mm 1720mm 1780 mm 1735mm
nlime 1740 mm 1740 mm 1700 mm 1720mm 1910 mm 1595 mm
Ampatament 2855 mm 2630 mm 2750 mm 2430mm 2722 mm 2425 mm
Ecatament 1634/
1645 mm
1500/
1540 mm
1530/
1540 mm
1340/
1350mm
1430/
1445 mm
1530/
1580 mm
Putere max.. 205CP/
5400 rpm
129CP/
4000 rpm
128CP/
4800 rpm
120/
6800rpm
194/
5000 rpm
125CP/
5600 rpm
Cuplu max . 290Nm/
3000 rpm
427Nm/
4000 rpm
220Nm/
3200 rpm
131Nm/
4500
rpm
313Nm/
3000 rpm
184Nm/
3600 rpm
Masa proprie 1872kg 2065kg 2100kg 2205kg 2500kg 1365kg
Pneuri 245/
70R16
265/
70R16S
265/
70R18S
190/
55HR34
265/
65R18H
205/70
R15H
Viteza max. 187Km/h 175Km/h 180Km/h 180Km/
h
180Km/h 180Km/h
Dinamica autovehiculului
43
Nissan
King
Cab
Savamag
TC-10
Diesel
UMM
Alter
Land
Rover
Defender
Mitsubishi
Pajero
3.2DI-D
Toyota
Land
Cruiser100
Punte
motoare
F+S F+S F+S F+S F+S F+S
Nr ui 2 2 2 2 2 2
Nr. locuri 5 2 2 2 2 2
C.V. 5 trepte 5 trepte 5 trepte 5 trepte 5 trepte 5 trepte
Masa total 2700 kg 3000 kg 2720kg 2949
Lungime 4580 mm 4450 mm 3995
mm
4631 mm 4280 mm 4890 mm
Lime 1690 mm 1720 mm 1690
mm
1790 mm 1856 mm 1941mm
nlime 1705 mm 2105 mm 1995
mm
2020 mm 1840 mm 1880 mm
Ampatament 2955 mm 2770 mm 2560
mm
2796 mm 2662 mm 3025 mm
Ecatament 1450/
1380 mm
1400/
1400 mm
1330/
1340
mm
1486/
1486 mm
1520/
1525 mm
1530/
1600 mm
Putere max.. 75CP/
4300
rpm
69CP/
4000
rpm
76CP/
4500
rpm
107/
3800
rpm
121/
3800 rpm
150CP/
3400 rpm
Cuplu max . 163Nm/
2200
rpm
145Nm/
2000
rpm
151Nm/
2000
rpm
260Nm/
1800
rpm
373Nm/
2000 rpm
430Nm/
2800 rpm
Greutatea
util
1100kg 1140kg 1110kg 1225kg 2000kg 2495kg
Pneuri
205/R16
7,50/R16 205R16 7,50R16 235/
80R15
275/70
R16
Viteza max. 125Km/h 122Km/h 130
Km/h
135Km/h 165Km/h 165Km/h
Dinamica autovehiculului
44
S-ar putea să vă placă și
- Dinamica AutovehiculelorDocument37 paginiDinamica Autovehiculelornicol_irina9367% (3)
- Stoicescu A Proiectarea Performațelor de Tracțiune Și de Consum Ale AutomobilelorDocument382 paginiStoicescu A Proiectarea Performațelor de Tracțiune Și de Consum Ale AutomobilelorPredaAlinÎncă nu există evaluări
- Proiect CCA2Document31 paginiProiect CCA2Robert Predusca100% (4)
- Carte Dinamica Autovehiculelor Rutiere - AcademicDocument268 paginiCarte Dinamica Autovehiculelor Rutiere - Academiczmeudevik100% (9)
- Proiect Auto FinalDocument91 paginiProiect Auto FinalAlexandru Miloiu100% (1)
- CCA Cutie de VitezeDocument22 paginiCCA Cutie de Vitezepzn2380% (5)
- CCA2 Proiect SuspensieDocument19 paginiCCA2 Proiect SuspensieTanaseLoriÎncă nu există evaluări
- Convertorul Catalitic Cu Trei Căi - IlmDocument3 paginiConvertorul Catalitic Cu Trei Căi - Ilmxstyle123Încă nu există evaluări
- Proiectarea Suspensiei Active A Unui AutocamionDocument54 paginiProiectarea Suspensiei Active A Unui AutocamionRazvanAmironesei100% (1)
- Sistemul de Directie ServohidraulicDocument40 paginiSistemul de Directie ServohidraulicGheorghe Cojocari100% (2)
- Dinamica Autovehiculelor 2Document13 paginiDinamica Autovehiculelor 2emilÎncă nu există evaluări
- Dinamica Autovehiculelor Vol I - Stoicescu - UPB 1980Document251 paginiDinamica Autovehiculelor Vol I - Stoicescu - UPB 1980dymy100% (2)
- CCMAI - Proiect 1Document40 paginiCCMAI - Proiect 1RapRockManiac100% (1)
- Proiect CCA - AmbreiajDocument35 paginiProiect CCA - AmbreiajFlorea AndreiÎncă nu există evaluări
- Proiect Dinamica Autovehiculelor RutiereDocument82 paginiProiect Dinamica Autovehiculelor Rutierepuybogdan86% (7)
- Proiect Din Dinamica AutovehiculelorDocument29 paginiProiect Din Dinamica AutovehiculelorBogdan PuiaÎncă nu există evaluări
- Calcul Dinamic Autovehicul Motor 50 KWDocument43 paginiCalcul Dinamic Autovehicul Motor 50 KWmihai1957100% (1)
- Suspensie CCA2Document30 paginiSuspensie CCA2Rosu Andrei100% (1)
- Ambreiaj BidiscDocument146 paginiAmbreiaj BidiscNelu Barbu50% (2)
- Proiect Autovehicule IDocument113 paginiProiect Autovehicule IJureschi Ioan100% (1)
- Proiect Calculul Si Constructia Autovehiculelor Rutiere IDocument85 paginiProiect Calculul Si Constructia Autovehiculelor Rutiere Iiulianilie100% (1)
- Proiect CCAR 1Document68 paginiProiect CCAR 1Andrei DontuÎncă nu există evaluări
- 7transmisia LongitudinalaDocument21 pagini7transmisia Longitudinalageorgehent100% (4)
- Proiectarea Unei Suspensii AutoDocument32 paginiProiectarea Unei Suspensii AutoCosmin Mihai Kirita100% (1)
- Indrumar Dinamica (Fara Parola)Document204 paginiIndrumar Dinamica (Fara Parola)laura2103383% (6)
- Proiect Transmisii Pentru AutovehiculeDocument25 paginiProiect Transmisii Pentru AutovehiculeAndrei Uta100% (3)
- Dinamica AutovehiculelorDocument41 paginiDinamica AutovehiculelorVlad-Mihai ConstandachiÎncă nu există evaluări
- Proiect CCSTDocument28 paginiProiect CCSTTiberiu Niga100% (1)
- Proiect La Dinamica Autovehiculelor - 4X4 MASDocument30 paginiProiect La Dinamica Autovehiculelor - 4X4 MASZodila Dragos Mihai50% (4)
- Elemente de Dinamica A AutovehiculelorDocument266 paginiElemente de Dinamica A AutovehiculelorJurcau Claudiu Mihai100% (1)
- Dinamica Autovehiculelor Rutiere Proiect FinalDocument92 paginiDinamica Autovehiculelor Rutiere Proiect Finalcostz_05Încă nu există evaluări
- Determinarea Razelor Rotilor AutomobiluluiDocument5 paginiDeterminarea Razelor Rotilor AutomobiluluiDinu DoruÎncă nu există evaluări
- CCA Sistemul de DirectieDocument32 paginiCCA Sistemul de DirectieagdagdsÎncă nu există evaluări
- Punti Pentru Autoturisme Si AutoutilitareDocument55 paginiPunti Pentru Autoturisme Si AutoutilitareMihai VelescuÎncă nu există evaluări
- Proiect CCA IIDocument25 paginiProiect CCA IIBogdanÎncă nu există evaluări
- Dinamica Autovehiculelor RutiereDocument98 paginiDinamica Autovehiculelor RutiereRadu SchiporÎncă nu există evaluări
- Calcul Diferential 20199Document19 paginiCalcul Diferential 20199Luca VictorÎncă nu există evaluări
- Dinamica ProiectDocument37 paginiDinamica ProiectClaudiu RotaruÎncă nu există evaluări
- Studiul Teoretic Al Coliziunii Autovehiculelor Și Al Cinematicii Ocupantului La ImpactDocument21 paginiStudiul Teoretic Al Coliziunii Autovehiculelor Și Al Cinematicii Ocupantului La ImpactPredaAlin100% (1)
- 1.mecanism de GhidareDocument12 pagini1.mecanism de GhidareBordea AlinÎncă nu există evaluări
- Proiect CCA2 Directie Tanase PDFDocument47 paginiProiect CCA2 Directie Tanase PDFAdelina Toma100% (1)
- Dinamica AutovehiculelorDocument41 paginiDinamica Autovehiculelorandreeaoana45Încă nu există evaluări
- Proiect DarDocument75 paginiProiect DarpuybogdanÎncă nu există evaluări
- Dinamica Autovehiculelor - 1/4 ProiectDocument23 paginiDinamica Autovehiculelor - 1/4 ProiectmucifixÎncă nu există evaluări
- Din Auto Partea 1.1Document26 paginiDin Auto Partea 1.1Darius TroesvhiÎncă nu există evaluări
- Dinamica Autovehiculelor Rutiere NICU LAURENȚIUDocument84 paginiDinamica Autovehiculelor Rutiere NICU LAURENȚIUnicuÎncă nu există evaluări
- Suport Proiect PMTDocument28 paginiSuport Proiect PMTRobert GorieÎncă nu există evaluări
- Proiect CCSTDocument5 paginiProiect CCSTyeLLow TigerÎncă nu există evaluări
- Parametrii de Bază Ai Autovehiculelor - Moțoc AlinaDocument17 paginiParametrii de Bază Ai Autovehiculelor - Moțoc AlinaflrflorincalinÎncă nu există evaluări
- 4X4 8 LocuriDocument12 pagini4X4 8 LocuriAndrei GhitaÎncă nu există evaluări
- Proiect DADocument26 paginiProiect DAcrismarc96100% (1)
- Parametrii AutomobilelorDocument1 paginăParametrii AutomobilelorMarian StefanÎncă nu există evaluări
- Proiect SeeaDocument25 paginiProiect SeeaAndrei TataruÎncă nu există evaluări
- PROIECT LA Caroserii Si Sisteme de SigutDocument29 paginiPROIECT LA Caroserii Si Sisteme de SigutIulian PuscasuÎncă nu există evaluări
- Suport Proiect PMTDocument27 paginiSuport Proiect PMTRobert GorieÎncă nu există evaluări
- Dinamica ProiectDocument31 paginiDinamica Proiectradoo9Încă nu există evaluări
- Proiect PMTDocument24 paginiProiect PMTJohn Alexandru IacobÎncă nu există evaluări
- P1Document104 paginiP1Nitulescu GeorgeÎncă nu există evaluări
- MT 5 - Parametrii Mijloacelor de Transport Rutier. Exploatarea AutomobilelorDocument98 paginiMT 5 - Parametrii Mijloacelor de Transport Rutier. Exploatarea AutomobilelorFunny GuyÎncă nu există evaluări
- Proiect PMT GrigorasDocument23 paginiProiect PMT GrigorasJohn Alexandru IacobÎncă nu există evaluări
- Productie Si AprovizionareDocument28 paginiProductie Si AprovizionareIonela GiuroiuÎncă nu există evaluări
- Calculul Si Constructia AutomobilelorDocument58 paginiCalculul Si Constructia AutomobilelorFlorian Grigore100% (2)
- Managementul AprovizionariiDocument16 paginiManagementul AprovizionariiAlina CristinaÎncă nu există evaluări
- Fabricarea Si Repararea Autovehivulelor L14Document9 paginiFabricarea Si Repararea Autovehivulelor L14Ionela GiuroiuÎncă nu există evaluări
- Sistemul de AprindereDocument9 paginiSistemul de AprindereIonela GiuroiuÎncă nu există evaluări
- DVDocument90 paginiDVIonela GiuroiuÎncă nu există evaluări